Information Technology Reference
In-Depth Information
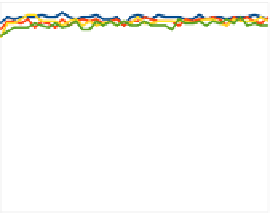
(a)
(b)
Fig. 3.
Experiment A: Success rate for different number of robots. (a) Experiment A,
(b) Experiment B.
validation of the approach and the assumptions made. It also will address the
coordination issues so robots can move simultaneously and will consider com-
pletely stochastic environments. More complex tasks and scenarios may also
benefit from integrating hierarchical structures and this is also a very appealing
field of research.
References
1. Busoniu, L., Babuska, R., Schutter, B.D.: A comprehensive survey of multiagent
reinforcement learning. IEEE Transactions on Systems, Man, and Cybernetics,
Part C: Applications and Reviews 38(2), 156-172 (2008)
2. Duro, R.J., Graña, M., de Lope, J.: On the potential contributions of hybrid in-
telligent approaches to multicomponen robotic system development. Information
Sciences 180(14), 2635-2648 (2010)
3. Echegoyen, Z., Villaverde, I., Moreno, R., Graña, M., d'Anjou, A.: Linked multi-
component mobile robots: modeling, simulation and control. Robotics and Au-
tonomous Systems 58(12), 1292-1305 (2010)
4. Fernandez-Gauna, B., Graña, M., Lopez-Guede, J.M.: Towards concurrent
q-learning on linked multi-component robotic systems. In: HAIS 2011. LNCS
(LNAI), Springer, Heidelberg (2011) (in press)
5. Fernandez-Gauna, B., Lopez-Guede, J.M., Zulueta, E., Graña, M.: Learning hose
transport control with Q-learning. Neural Network World 20(7), 913-923 (2010)
6. Fernandez-Gauna, B., Lopez-Guede, J.M., Zulueta, E.: Linked multicomponent
robotic systems: Basic assessment of linking element dynamical effect. In: Cor-
chado, E., Graña, M., Savio, A. (eds.) Hybrid Artificial Intelligence Systems, Part
I, vol. 6076, pp. 73-79. Springer, Heidelberg (2010)
7. Fernandez-Gauna, B., Lopez-Guede, J.M., Zulueta, E., Echegoyen, Z., Graña, M.:
Basic results and experiments on robotic multi-agent system for hose deployment
and transportation. International Journal of Artificial Intelligence 6(S11), 183-202
(2011)

























































Search WWH ::

Custom Search