Information Technology Reference
In-Depth Information
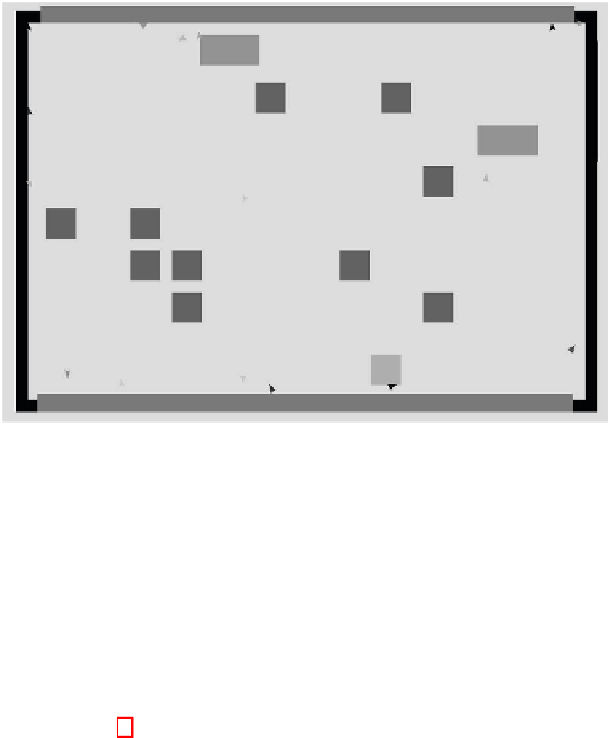
Fig. 2.
Representation of the application environment
3 Collective Gathering and Construction Task
The experiment involves a group of robots that must carry out a collective
gathering and construction task. The robots must find blocks in the environment,
activate them (basically equivalent to taking them out of a box or pallet), push
them towards another block and assemble them and, finally, take the assembled
units to the collection areas. The
Individuals
and
Environment components
that
define the problem have been implemented within ASiCo. The resulting scenario
is displayed in Fig. 2 containing the following elements:
The blocks:
they represent elements that the robots need to locate and move
to carry out the task. They can be in three states: inactivated (dark squares),
activated (light squares) or assembled (dark rectangles). An inactive block is an
isolated block that has not been found by any robot. Thus, a block becomes ac-
tive when it is found and acquired by any robot, changing its state. An assembled
or built block is created when two isolated blocks are joined.
The collection areas:
these are zones of the environment where the assembled
blocks must be placed. They are represented by the top and bottom sides in the
scenario of Fig. 2.
The robots:
they move around the environment looking for blocks to activate,
to assemble or to move to the collection zones. They are represented by triangles
with a color that varies depending on the robot energy level. Each robot has six
sensors that provide the distance and angle to the nearest block of each type.
They also have two state parameters, position and age, which vary during lifetime
Search WWH ::

Custom Search