Information Technology Reference
In-Depth Information
This paper is organized as follows. In section two we present the robotic system
and the neural architecture that allows the robot to learn. We also explain how
neurons were modeled highlighting the cybernetic principles that are implicit in
the equations. In section 3 we place the robot on the inclined floor, and evaluate
its behavior with different kind of stimuli.
In section 4 we study the practical consequences that could be derived from
the tests with the robot for improving the performance of the inclined floor
technique.
2
Architecture of the Robot
2.1 Architecture and Connectivity of the Robotic System
The robotic structure was built with a LEGO MindstormsNXT toolkit. The
software for modeling the neural network and the sensory and motor commands
were written in Matlab using the RWTH Mindstorms NXT toolbox which is of
public domain and available on the internet.
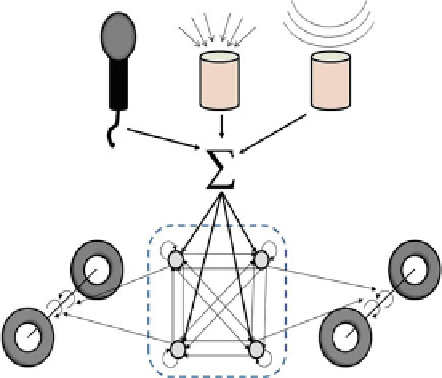
The feed-forward path of the robot consisted in a set of four fully intercon-
nected neurons (see Fig. 2), each one of them controlling a specific clockwise
or anticlockwise movement of two servomotors acting over two wheel sets. The
feed-back path of the robot consisted in three sensors: a microphone, a light
sensor and an ultrasonic sensor. The contribution of these sensors is summed
and this sum increases the activation of the four neurons.
Fig. 2.
Organization of the robotic system. Three types of sensors send their infor-
mation to the four-neurons robot “brain”. Each neuron commands a specific clock or
anticlockwise movement of each of the two wheel sets.
Search WWH ::

Custom Search