Biology Reference
In-Depth Information
W
ext
system
cutoffs
pairlist skip
∆
F
=
W
ext
+
W
MD
+
W
thermo
-
T
∆
S
W
MD
constraints
integrator
-W
thermo
thermostat
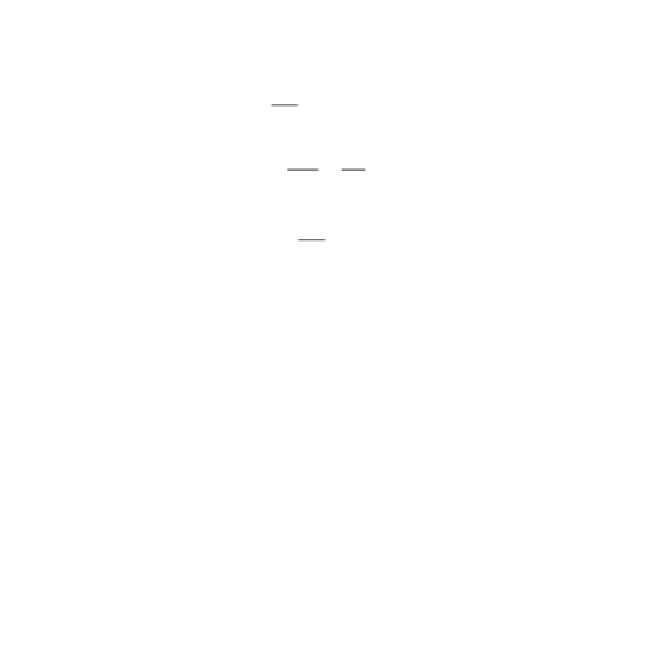
Fig. 4.
Schematic representation of a thermostated MD system. Red arrows repre-
sent heat or work flows.
is introduced that plays the role of a time-dependent
friction coefficient. The resulting dynamics is no longer Newtonian:
auxiliary variable
ζ
p
m
i
r
=
i
i
d
d
V
rQ
p
p
m
z
p
=-
-
i
i
i
2
Â
i
z
=
-
NkT
.
dj B
i
i
Here,
Q
is a pseudomass determining the time scale of the thermostat and
N
df
is the number of degrees of freedom in the system. We see that the
time derivative of
is essentially determined by the difference between
the instantaneous temperature (or kinetic energy) of the system and the
target temperature
T
. Note that the NH equations of motion are not
Hamiltonian. The main property of the NH dynamics, however, is that it
is formally proven to produce a canonical distribution for the physical
degrees of freedom (
r
,
p
).
18
The NH thermostat can be improved in var-
ious ways, including chains of thermostats for better ergodicity or control
of higher moments of the velocity distribution.
Besides the NH thermostat, different types of thermostats have been
proposed,
19
one of the first being the weak coupling or Berendsen ther-
mostat.
20
The Berendsen thermostat is based on a first-order (exponential)
ζ