Environmental Engineering Reference
In-Depth Information
implies that habitat patches that are suitable may be
temporarily empty. For restoration purposes there is
therefore a need to identify potentially suitable hab-
itat patches, which may or may not be occupied. How
can suitable habitat be identified? Habitat models
originated in the USA in the 1970s, and were devel-
oped further in Australia in the 1980s and in Europe
in the 1990s (Kleyer
et al
. 2000). The focus has been
on statistical models and on expert-based habitat
models. A major contribution to nature conservation
planning resulted from relating habitat models to
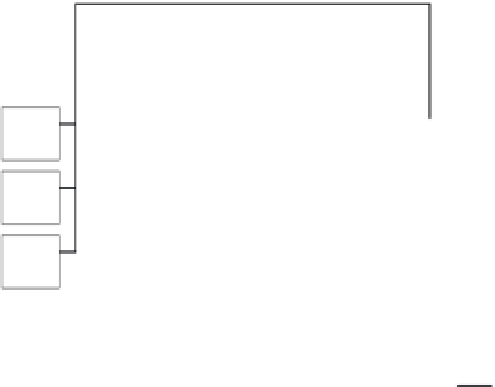
geographic information systems (GISs). Corsi
et al.
(2000) combined deductive and inductive approaches
to identify species distributions (see Fig. 6.5). The
deductive approach uses known species' ecological
requirements to extrapolate suitable areas from the
environmental variable layers in the GIS database. The
inductive approach is used to derive the ecological
requirements of the species from locations in which
the species occurs. These two approaches can contribute
to habitat suitability mapping. Concerning statistical
models, recent publications favour logistic regression
as compared to discriminant analysis. Note that stat-
istical habitat models imply the assumption that the
observed occurrence is in equilibrium with the envir-
onmental factors and their spatial arrangement. Clearly
setting the preconditions necessary to transfer hab-
itat models in time and space, which then have to be
validated, is seen as a prerequisite for application in
6.3 Suitable habitat patches
Effects of habitat fragmentation on birds and mam-
mals in landscapes with different proportions of suit-
able habitat have been reviewed by Andrén (1994).
Many studies he referred to have found that com-
munities or populations of single species in small
patches were not random samples from large patches.
A more fine-tuned analysis showed that studies in
which an effect of area and/or isolation on species
number or density was found were from landscapes
with highly fragmented habitat, whereas those yield-
ing results that were not different from those predicted
by the random-sample hypothesis were mainly from
landscapes with a larger proportion of suitable habitat.
In this respect, there was no difference in principle
between mammals and birds, nor between resident birds
and migratory birds. The review indicated that there
might be a threshold in the proportion of suitable hab-
itat in the landscape, above which habitat fragmenta-
tion is pure habitat loss. Indeed, a review by Fahrig
(2003) has shown clearly that it is most important to
distinguish between effects of habitat loss and effects
of habitat fragmentation, because habitat loss has large
negative effects on biodiversity, whereas the effects
of habitat fragmentation are rather weak and may be
positive or negative.
In the metapopulation approach both immigration
and local extinction are normal phenomena. This
A priori
knowledge
GIS
layer
Species-
distribution
map
Species-environment
relationship
Spatial
model
GIS
layer
validation
validation
Fig. 6.5
General data flow of
the two main categories of GIS
species-distribution models,
indicating inductive and deductive
approaches which in combination
can be used to identify suitable
habitat. After Corsi
et al
. (2000).
Reproduced by permission of
Columbia University Press.
GIS
layer
Analysis of
species-environment
relationship
validation
Observations
inductive
deductive
SPECIES