Image Processing Reference
In-Depth Information
Reprinted from
Information Sciences
59(1992), P. P. Das, J. Mukherjee and B. N. Chatterji, The t-Cost Distance
in Digital Geometry, 1-20, Copyright (1992), with permission from Elsevier.
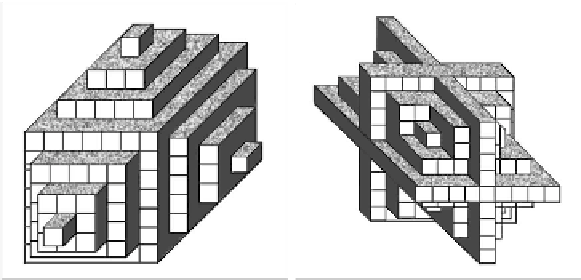
FIGURE 2.10: HS
6
(6) or sphere of d
6
, in 3-D for radius = 6 and HS
5
(4)
or sphere of d
5
, in 3-D for radius = 4.
as the neighborhood sequence B. We use the following notation:
H(B;r) =⇒ H(N(·);r).
2.5.5.1
Vertices of Hyperspheres and Approximations
The vertices of a H(B) are given in the following theorem from [64].
Theorem 2.25. For a well-behaved B, an H(B;r) has its corners at φ(x)
(where φ(·) is the 2
n
symmetry function in Definition 2.2), with x computed
as follows:
x
i
= ⌊r/p⌋·(f
i
(p)−f
i−1
(p)) + f
i
(r mod p)−f
i−1
(r mod p),1 ≤ i ≤n
where
Length : p = |B|
N −Sequence : B = {b(1),b(2),··· ,b(p)}
Trimmed B : B
i
= {b
i
(1),b
i
(2),··· ,b
i
(p)},
b
i
(j) = min(b(i),i), ∀i,1 ≤ i ≤p
Sum Sequence : F
i
= {f
i
(1),f
i
(2),··· ,f
i
(p)},
f
i
(j) =
j
k=1
b
i
(k),∀i,1 ≤ i≤ p and
F
0
= {0,0,··· ,0}and f
i
(0) = 0
€
It may be noted that for r < p, some of the vertices merge to form degen-
erate circles and spheres in both 2-D and 3-D. The following bounds hold for
all N-Sequences.