Image Processing Reference
In-Depth Information
n
i=1
2. ∀,m≤ 1,δ
m
(x,y) =
|x
i
−y
i
|/m, and
3. if m > m
′
then δ
m
(x,y) ≤ δ
m
′
(x,y). That is δ
m
is a monotonically
non-increasing function of m.
€
2.3.2 t-Cost Distance
In this section we present a class of distance functions (to be precise 2
n
−1
distinct functions) in n-D grid point space Z
n
with non-unity (but integral)
neighbor costs. We show in the Theorem 2.7 that only n of the possible (2
n
−1)
functions satisfy metric properties and derive the necessary and su
cient con-
dition for the same. Subsequently, these n metrics are called t-cost distances
in n-D. They represent the shortest path length for t-cost neighborhoods (Ta-
ble 2.1). Under this neighborhood notion, two points in Z
n
are neighbors when
their corresponding hypervoxels share a hyperplane of any dimension. How-
ever, the cost associated with the neighborhood is at most t, 1 ≤ t ≤ n, such
that if two consecutive points on a shortest path share a hyperplane of dimen-
sion r, the distance between them is taken as min(t,n−r). For u,v ∈ Z
n
,
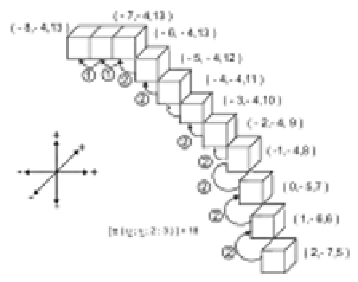
t-cost paths are represented as Π(u,v;t : n). A shortest path is illustrated in
Fig. 2.6.
Reprinted from Sadhana 18
− II
(1993), P. P. Das and B. N. Chatterji,
Digital Distance Geometry: A Survey
,
159-187, Copyright (1993), with permission from Indian Academy of Sciences.
FIGURE 2.6: A minimal 2-cost path Π
∗
(2 : 3) from (2,-7,5) to (-8,-4,13)
in 3-D. The costs between adjacent points on the path are encircled in the
figure. We have |Π
∗
| = 8×2 + 2×1 = 18. Also, D
2
((2,−7,5),(−8,−4,13)) =
D
2
((10,3,8)) = max(10,3,8) + max(min(10,3),min(3,8),min(8,10)) = 10 +
8 = 18.
The t-cost distance provides a generalization for City Block and Chess-