Image Processing Reference
In-Depth Information
Reprinted from Sadhana 18(1993), P. P. Das and B. N. Chatterji,
Digital Distance Geometry: A Survey
, 159-187,
Copyright (1993), with permission from Indian Academy of Sciences.
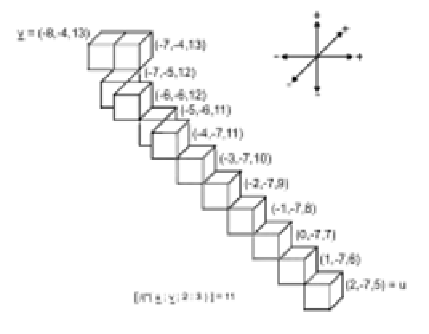
FIGURE 2.4: A minimal O(2) or 18-path between two points (2,-7,5) and
(-8,-4,13) in 3-D.
∩Neb(y;N(·)), is chosen if Π
∗
(y,0) is a concatenation
of Π
∗
(y,z) and Π
∗
(z,0) (evidently, |Π
∗
(y,0)| = |Π
∗
(y,z)| + |Π
∗
(z,0)|). In
Algorithm 3 we illustrate such a choice for O(m)-neighborhood set for d
m
distance.
the algorithm, z ∈ Σ
n
2.2.3 Distances and Metrics
In Z
n
, Euclidean distance E
n
is defined as follows:
Definition 2.11. In n-D, E
n
: Z
n
× Z
n
→ R
+
∪ {0} is the Euclidean
distance where ∀u,v ∈ Z
n
, E
n
(u,v) =
n
i=1
(u(i)−v(i))
2
€
From Euclidean geometry, we know that the length of the shortest path
(that is, a straight line joining two points) is given by the Euclidean distance.
A similar result holds for various neighborhood-defined paths in digital n-D
geometry. Once we define a neighborhood, the resulting shortest path between
two points has a length that is represented by a nice closed form distance
function that gives the length of the shortest path in terms of the coordinates
of the two points and the parameters of the neighborhood set.
A distance function usually has this property of representing the length of
the shortest path, provided it is a metric in the following sense.
Definition 2.12. A distance function d : Z
n
× Z
n
→ R
+
∪{0} is called a
metric if ∀u,v,w ∈ Z
n
,
1. d is a total: d(u,v) is defined and finite.