Image Processing Reference
In-Depth Information
TABLE 2.1: Common neighborhood definitions in n-D [60, 58]. Neighbor-
hood conditions and costs are shown for neighbors u,v ∈ Z
n
.
Neighborhood
Condition
Cost
Remarks
Set [N(·)]
[w = u − v]
[δ(w)]
max
i=1
m-neighbors
|w
i
| ≤ 1
1
u and v are separated
P
n
i=1
1 ≤ m ≤ n
|w
i
| = m
by m-D hyperplane
max
i=1
O(m)-neighbors
|w
i
| ≤ 1
1
r-neighbors for
P
n
i=1
1 ≤ m ≤ n
|w
i
| ≤ m
1 ≤ r ≤ m
P
n
i=1
max
i=1
t-cost-neighbors
|w
i
| ≤ 1 min(t,
|w(i)|)
Cost bounded by t and
1 ≤ t ≤ n
dimension of separating
hyperplane
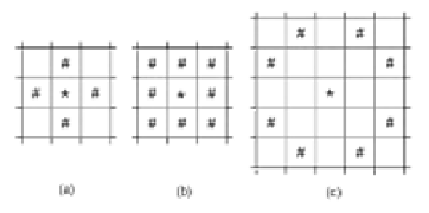
2-D: For any x ∈ Z
2
, there are 4 O(1)-adjacent neighbors that share an edge
with x and 8 O(2)-adjacent neighbors that share an edge or a corner with
x. These are known as 4-neighbors and 8-neighbors, respectively. We
illustrate these neighborhoods in Fig. 2.1.
N(Knight) = {(±1,±2),(±2,±1)} is defined as a move of a Knight on
a chessboard. It is an example of a non-proximal neighborhood set.
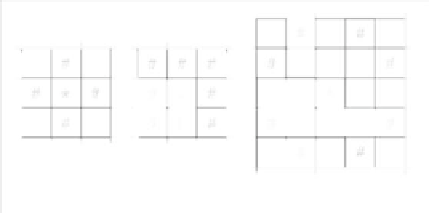
3-D: For any x ∈ Z
3
, there are 6 O(1)-adjacent neighbors that share a face
with x, 18 O(2)-adjacent neighbors that share a face or an edge with
x, and 26 O(3)-adjacent neighbors that share a face or an edge or a
corner with x. These are known as 6-neighbors, 18-neighbors, and
26-neighbors, respectively. We illustrate these neighborhoods in Fig.
2.2.
€
Reprinted from Sadhana 18(1993), P. P. Das and B. N. Chatterji,
Digital Distance Geometry: A Survey
, 159-187,
Copyright (1993), with permission from Indian Academy of Sciences.
FIGURE 2.1: Neighborhoods of a point (marked with “*”) in 2-D. (a) 4-
Neighbors, (b) 8-Neighbors, and (c) Knight Neighbors.