Image Processing Reference
In-Depth Information
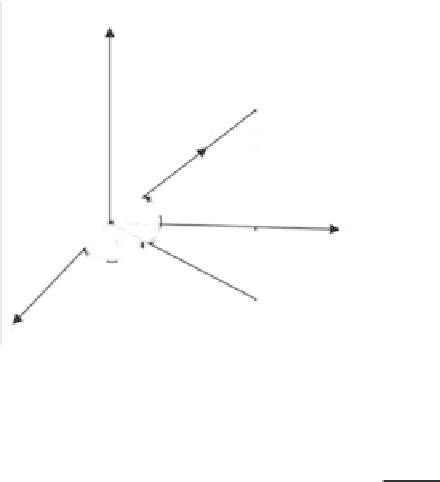
FIGURE 3.9: The slopes of a 3-D line segment given by θ and φ. r shows
the length of the line.
−1
(p) and θ = tan
−1
(q/
can be written as the pair φ = tan
1 + p
2
). The first
point of the 3-D line segment is (0,y
1
,z
1
) and the final point is at x = x
2
.
€
Thus, any straight line segment L in 3-D can be denoted by a pair of line
segments L
Z
, L
Y
in 2-D representing the projections of L on the XY and
XZ planes, respectively. Next, we state that without any loss in generality,
for any straight line, there exists a coordinate transformation such that φ lies
within 0 and π/4 and θ lies between 0 and tan
−1
(sinφ).
Lemma 3.7. Without any loss of generality, for any 3-D line segment, 0 ≤
φ≤ π/4, 0 ≤ θ ≤ tan
−1
sin(φ) for a proper choice of axes [39].
€
From a different perspective, the parameters that characterize a 3-D CSLS
L may as well be its direction cosines l, m, n, the initial point (0,y,z), and x
2
,
the X-coordinate of the final point of L. It is no restriction to assume that L
lies on the first octant, which means all of l, m, n are non-negative. Moreover,
in accordance with the relationship l
2
+ m
2
+ n
2
= 1, these three quantities
cannot be zero simultaneously. Thus, we may select the axes properly to ensure
the l ≥ m ≥ n ≥ 0 and l + m + n > 0. Actually these conditions and the
ones stated in the previous lemma are satisfied simultaneously with the same
choice of axes.
Lemma 3.8. For all lines in the first octant, the pair of conditions l ≥ m ≥
n ≥ 0 and l + m + n > 0 is equivalent to the pair of conditions tanφ ≤ 1,
tanθ ≤ sinφ for the same choice of axes [39].
€
When a CSLS L in the first octant starting from (0,y
1
,z
1
) satisfies these
sets of inequalities, L is said to be in the standard situation. In the following,
unless otherwise stated, a 3-D CSLS L is always assumed to be in the standard
situation.