Information Technology Reference
In-Depth Information
all 17 puzzles. Due to memory space limitations, algorithm A* is not able to find a
solution for any of the 6x6 puzzles, and for 2 of the 5x5 puzzles. Although algorithms
PBA*-R and PBA*-VD are not admissible, they find near-optimal solutions. (In fact,
the average solution path length found by both versions of PBA* is near-equal to the
optimal path length, 45, as found by A*, which is an admissible algorithm.). For ei-
ther version of PBA*, an
intersection detection
algorithm
, IDA-3, is used to control
search process communication. IDA-3 is originally described in [10] and it has been
used in several of our previous works (e.g., [7, 8, 14, 15, 16]). The main characteristic
of IDA-3 is that it instructs two opposite-direction search processes to exchange
nodes (and, henceforth, compare those nodes) if such nodes are deemed to be “similar
enough” so that they are possibly identical. Since algorithm IDA-3 is central in our
evaluation due to its communication cost, we describe IDA-3 here.
Intersection Detection Algorithm IDA-3.
Every search space is represented as a N-dimensional polyhedron with 2
N
corners.
Each corner has coordinates
(
)
R
,
RR
,...,
1
i
2
i
i
R
is either the minimum or the maximum distance of the X-node correspond-
ing to that search space, from the reference node
R
, j = 1, ..., N. Two search spaces
S
and
S
may contain a common node when there is an overlap of their corre-
sponding polyhedra. A common node between two search spaces is not possible to
exist, until such an overlap occurs.
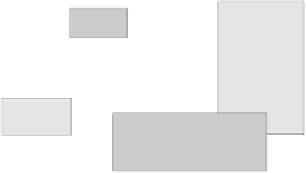
Two search spaces
S
and
S
might contain an intersection when there is an over-
lap for each of their reference node ranges. Pictorially this is represented by an inter-
section of the approximated spaces in the N-space. In Figure 5 this occurs for
where
ji
S
and
S
(for 2 reference nodes).
Fig. 5.
N-space intersection in PBA* (N = 2)






Search WWH ::

Custom Search