Information Technology Reference
In-Depth Information
can conduct a multimodal conversation (a dialogue);
•
•
can perceive orders;
•
can recognise orders;
•
can behave like a human;
•
can impersonate human interactions (reactions);
•
can learn;
•
is aware of the space, analyses the spatial situation;
•
recognises multimodal situations and is aware of their occurrence;
•
can execute its (simple) plans.
The Cogniron project was one of many implemented in the field of cognitive
robot building. Other work of this type was also undertaken by:
•
The United States Naval Research Laboratory and NCARAI Intelligent
Systems to develop a robot under the charming name of Octavia [189].
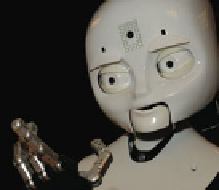
Octavia is a cognitive robot that recognises a given situation, analyses it as well
as its surroundings, can make human gestures, is agile, mobile and humanoid. The
robot's face shows expressions, which have never before been associated with ro-
bots. In addition, Octavia can learn new solutions based on situations that take place
(and are new for it). The movements of the mouth and eyes are very endearing, be-
cause although made by a robot, they seem to reflect expressions on a human face in
a very human way. Figure 7.1 shows the cognitive robot named Octavia.
Fig. 7.1.
The Octavia Robot. Source: [189]
•
The Vanderbilt University School of Engineering, Cognitive Robotics Labora-
tory, when creating the ISAC humanoid robot design [161].
ISAC is a robot that recognises the voice of a person giving it orders and consti-
tutes an interactive solution maintaining the human-robot relation, understands the
voice and can answer. It remembers earlier situations, both those from a moment
and a longer time ago, so it has layers of short-term memory and some elements of
long-term one from which it can recall memorized situations. ISAC operates using