Information Technology Reference
In-Depth Information
6
5
4
3
2
sl
1
min
0
−
1
max
−
2
−
3
−
4
−
4
−
3
−
2
−
1
0
x1
1
2
3
4
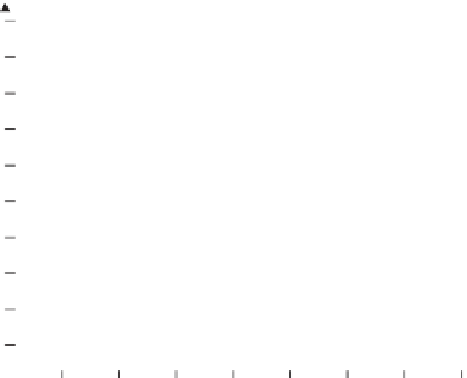
Figure 5.11
Temporal evolution of the sequential TLS EXIN neuron for the generic TLS
benchmark problem. (
See insert for color representation of the figure
.)
or does this type of representation not exist? The answer is given by the following
two theorems, which consider the problem from the reference of the orthogonal
distance
d
⊥
and the OLS distance
d
OLS
, respectively (see Figure 5.12).
Theorem 116 (Orthogonal Distance as Reference)
If the distances are
expressed with respect to the orthogonal distances, the GeTLS error function
(
5.6
)
does not exactly represent a sum of squared skew distances, except for
ζ
=
0
.
5(
TLS case
)
.
Proof.
From Figure 5.12 it follows that
d
⊥
cos
α
Hence, if it is assumed that the GeTLS error function (5.6) represents a sum of
squared distances,
d
GeTLS
=
E
GeTLS
=
d
GeTLS
=
d
⊥
cos
2
α
1
cos
2
1
cos
2
2
E
OLS
1
+
p
=
E
TLS
=
α
α
where
p
=
x
T
x
. Recalling eq. (5.6), we have
1
2
2
E
OLS
(
1
−
ζ )
+
ζ
p
E
GeTLS
=













Search WWH ::

Custom Search