Biomedical Engineering Reference
In-Depth Information
0.25
Ciliary
Retina
0.9
Zonulus
Sclera
Aqueous
Vitreous
1.0
0.8
R7.8
R12
Lens
ONH
5
Cornea
0.5
24.8
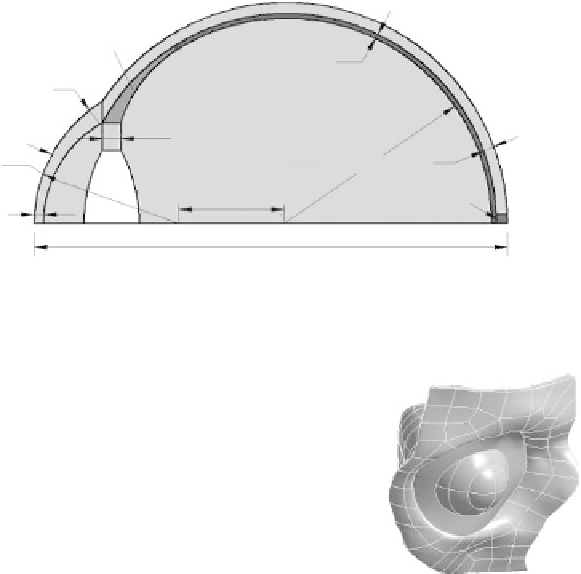
FIgure 21.3
Structures and dimensions of the geometric eye model in cross-section.
(a)
(b)
(c)
FIgure 21.4
Geometric model of the globe (a), the orbit bone (b), and the filling fat (c).
structure of the eye model is shown in Figure 21.3. A three-dimensional orbit model was recon-
structed based on computed tomography (CT) image sequences from a 28-year-old male subject.
The subject gave for use of his CT images for medical research purposes. Model reconstruction
was performed in MIMICS 10.01 (Materialise NV, Belgium). The space between the eyeball
and the orbital wall was filled with orbital fat. The geometric model of the orbit bone and fat is
shown in Figure 21.4. Extraocular muscles were excluded from the model because previous stud-
ies concluded that the muscles have little influence on the structural mechanical response when
the eye is subjected to dynamic impact (Kennedy and Duma, 2008).
21.2.3 m
aterial
p
ropertieS
The material properties of the cornea, sclera, lens, ciliary body, zonules, and aqueous humor were
derived from the Virginia Tech-Wake Forest University (VT-WFU) eye model (Duck, 1990; Czyan
et al., 1996; Uchio et al., 1999; Stitzel et al., 2002; Power et al., 2002). The retina was assumed to be
elastic with a Young's modulus of 20 kPa (Jones et al., 1992). Vitreous and fatty tissues were both
treated as viscoelastic materials (Lee et al., 1992; Schoemaker et al., 2006). The orbital bone was
assigned with a Young's modulus of 14.5 GPa (Robbins and Wood, 1969). It should be noted that a
four-parameter model equivalent to the Burgers model was used to describe the viscoelastic prop-
erties of the vitreous in Lee's work. However, the Burgers model is incompatible with the related
parameters in the current model. In ANSYS, viscoelastic materials perform as a linear solid visco-
elastic model with a Maxwell element in parallel with a spring element. The compliance function
()
0
Jt
for Burgers viscoelastic model can be expressed as
11
t
1
G
B
()
=+
k
Jt t
()
B
+−
exp(
−
t
)
0
GG
η
G
η
B
k
B
B
k
B
k
B



Search WWH ::

Custom Search