Information Technology Reference
In-Depth Information
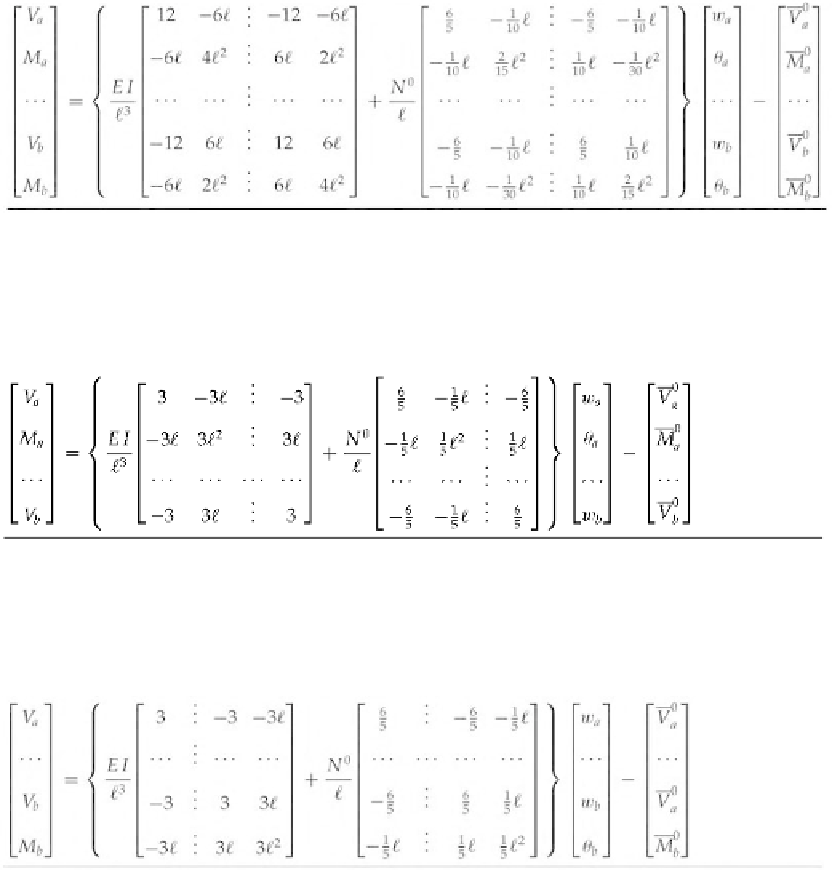
TABLE 11.3
Linear and Geometric Stiffness Matrices for a Beam with Various Boundary Conditions
(In these matrices
N
0
is in tension. For compression, replace
N
0
by
−
N
0
)
the deviations are larger for the rotation, which is the first derivative of
On the other
hand, the comparison also shows that the approximation for the geometric matrix up to
w.
2
is relatively good, as it covers with one term about half of the possible difference between
a linear first order theory and the analytical solution, including second order effects.
ε











Search WWH ::

Custom Search