Information Technology Reference
In-Depth Information
From Eq. (11.23) the other state variables can be expressed in closed form, too.
=
w(
x
)
w
−
w
θ(
x
)
w
+
N
0
w
V
(
x
)
−
EI
w
M
(
x
)
−
EI
.
C
1
C
2
C
3
C
4
1
x
/
c
(
x
)
s
(
x
)
.
0
−
1
/
(ε/)
s
(
x
)
−
(ε/)
c
(
x
)
.
=
···
···
··············· ···············
.
N
0
0
/
0
0
.
2
2
s
0
0
EI
(ε/)
c
(
x
)
EI
(ε/)
(
x
)
N
u
···
N
s
=
c
(11.34)
where for compression
x
x
c
(
x
)
=
cos
ε
s
(
x
)
=
sin
ε
(11.35)
and for tension
x
The four free parameters
C
1
to
C
4
can now be transformed such that they express quan-
tities with direct physical meaning, either through the four state variables at one end
of the bar
z
x
c
(
x
)
=
cosh
ε
s
(
x
)
=
sinh
ε
(
)
=
=
w
θ
M
a
]
T
, or through the four displacement variables
0
z
a
[
V
a
a
a
b
]
T
in the manner of the definitions of the transfer matrix or the stiff-
ness matrix, respectively, see Figure 11.11. Thus, this mathematical solution of Eq. (11.34)
=
w
θ
w
θ
v
[
a
a
b
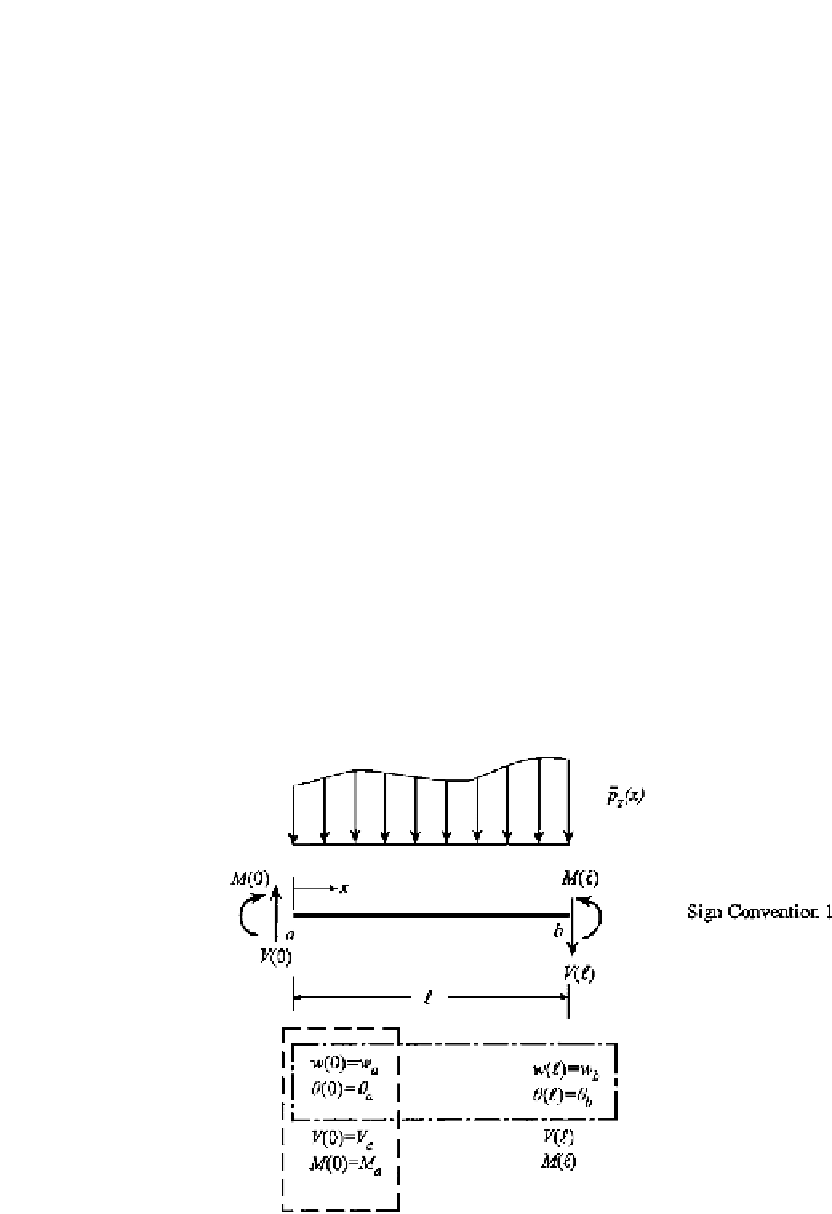
FIGURE 11.11
Combination of state variables into
z
a
for transfer matrices or
v
for stiffness matrices.











Search WWH ::

Custom Search