Information Technology Reference
In-Depth Information
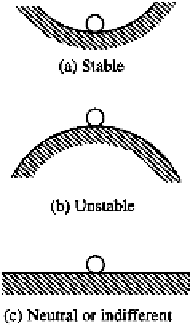
FIGURE 11.1
Stability of equilibrium positions.
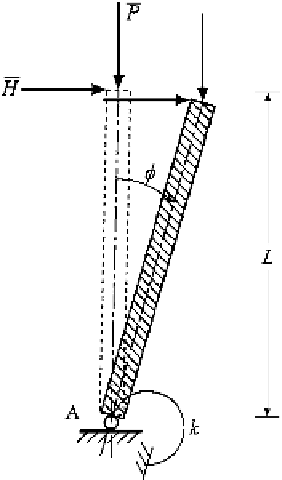
FIGURE 11.2
A rigid rod with spring.
Note that
P
is a nonli
ne
ar function of
φ
. To observe the response, plot
P
vs.
φ
. As show
n
for the case of non-zero
H
in Fig. 11.3a, typically, the displacement
va
ri
es smoothly as
P
increases, i.e., there is a unique a
nd
stable state of equilibrium for each
P
.
An interesting case occurs for
H
φ
=
0. Then
φ
L
sin
k
P
=
(3)
φ
which is always greater than
k
0 axis, it
w
ould appear that the
P
cannot
be evaluated. However, note that in t
he
limit as
/
L
. On the
φ
=
φ
→
0
, P
is equal to
k
/
L
. Thus, with the
rod in
a
vertical position (at
φ
=
0),
P
can be applied and increased until reaching the
value
P
L,
whereupon the bar could follow the path defined by (3). Then a small
change in
P
can cause a major change in
=
k
/
. The ph
en
omenon where there is more than
one equilibrium path is called
bifurcation
. The value
P
φ
=
k
/
L
is the bifurcation point (see
Fig. 11.3b).














Search WWH ::

Custom Search