Information Technology Reference
In-Depth Information
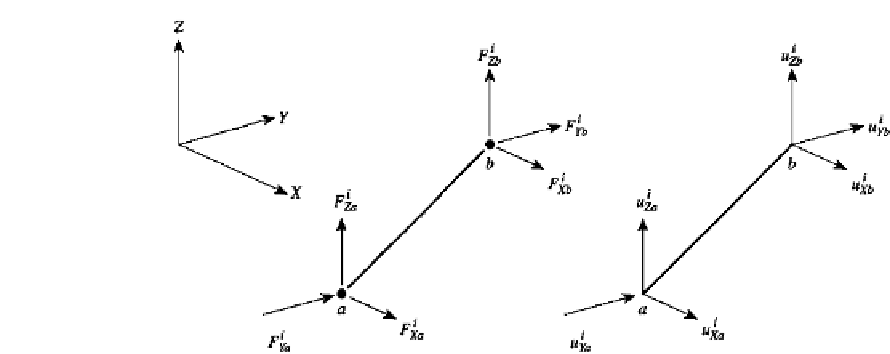
FIGURE 5.8
Element
i
with its forces and displacements (aligned along the global coordinate directions) at the ends
a
and
b
.
For simplicity, only three forces and three displacements are indicated at each end. Although only pure forces and
displacements are shown, moments and rotations are implied.
They are included in the basic relationships for an element
p
a
p
b
i
k
aa
i
v
a
v
b
i
k
ab
=
(5.19)
k
ba
k
bb
k
i
v
i
where
k
i
is a measure of the stiffness of an element and, hence, was referred to in Chapter 4
as the element stiffness matrix. Recall that the stiffness coefficients indicate the magnitude
of the forces corresponding to unit displacements at the nodes.
Note that the element stiffness matrix coefficients are assigned double subscripts, e.g.,
k
jk
. It follows from Eq. (5.19) that the first subscript
p
i
=
designates the node or location
for which the equation is established, while the second subscript
(
j
)
identifies the DOF
“causing” (or corresponding to) the forces
p
j
. In general, the
k
jk
of Eq. (5.19) are submatrices,
and not scalar coefficients.
It is often helpful to begin the representation of forces and displacements in a coordi-
nate system whose orientation may differ from that of the global coordinates. Define a
new reference frame
x
,
y
,
z
, along with corresponding forces and displacements, aligned
in a convenient, natural direction along the element. The coordinates
x
,
y
,
z
are referred
to as a local reference frame. Consider the bar of Fig. 5.9, where only pure forces and
displacements are shown. This chapter deals primarily with such line elements, although
often moments and rotations will occur at the nodes. Figure 5.9 shows a global refer-
ence frame
X
,
Z
, as well as a local reference frame
x
,
z
. The stiffness matrix is usu-
ally readily and very naturally established in the local coordinate system. This would
appear as
(
k
)
i
k
aa
i
i
k
ab
p
a
v
a
=
(5.20)
k
ba
k
bb
p
b
v
b
k
i
p
i
v
i
=
whereas for the global reference frame the stiffness matrix of Eq. (5.19) is a applicable. Note
that local coordinate quantities are indicated with a tilde
(
)
.







Search WWH ::

Custom Search