Information Technology Reference
In-Depth Information
TABLE 4.3
Transfer Matrix for a Beam Element, Part a:
Definitions:
k
∗
)/
λ
=
k
/
EI
,
η
=
k
/(
k
s
GA
)
,
ζ
=
(
N
−
EI
Sign Convention 1
e
1
+
ζ
e
3
−
e
2
−
e
4
/
EI
+
(
e
2
+
ζ
e
4
)/
k
s
GA
−
e
3
/
EI
λ
e
4
e
1
−
η
e
3
e
3
/
EI
(
e
2
−
η
e
4
)/
EI
U
i
=
λ
EI
(
e
2
+
ζ
e
4
)
−
λ
EIe
3
e
1
+
ζ
e
3
−
λ
e
4
λ
EIe
3
EI
(
e
0
−
η
e
2
)
e
2
e
1
−
η
e
3
0
b
w
w
V
M
0
b
V
b
M
b
θ
U
i
z
a
+
z
i
z
i
z
b
=
z
=
=
p
a
e
5
+
p
−
p
w
0
b
=
(
e
6
+
m
a
e
4
+
m
e
5
)/
−
p
a
(
e
3
+
ζ
e
5
)/
(
e
4
+
ζ
e
6
)/
EI
k
s
GA
k
s
GA
M
Ta
e
3
+
M
T
−
(
e
4
)/
;
EI
[
p
a
e
4
+
p
θ
0
b
=−
e
5
+
m
a
(
e
3
−
η
e
5
)
+
m
(
e
4
−
η
e
6
)
/
+
[
M
Ta
(
e
2
−
η
e
4
)
]
EI
+
M
T
(
e
3
−
η
e
5
)
]
/
EI
;
e
4
)
−
p
e
4
−
M
T
V
b
=−
m
a
e
5
+
m
p
a
(
e
2
+
ζ
(
e
3
+
ζ
e
5
)
+
λ(
e
6
)
−
M
Ta
λ
λ
e
5
;
p
a
e
3
−
p
M
b
=−
e
4
)
−
m
e
4
−
m
a
(
e
2
−
η
(
e
3
−
η
e
5
)
+
M
Ta
(
e
1
−
1
−
η
e
3
)
+
M
T
(
e
2
−
−
η
e
4
)
M
Tb
−
M
Ta
p
=
p
b
−
p
a
m
b
−
m
a
M
T
m
=
=
b
−
a
b
−
a
b
−
a
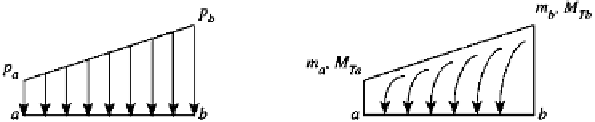
p
a
is the magnitude of the distributed applied force at
x
=
a
(force/length).
m
a
is the magnitude of the distributed applied moment at
x
=
a
(force-length/length).
p
is the gradient of the distributed applied force, linearly varying in the
x
direction
(force/length
2
).
m
is the gradient of the distributed applied moment, linearly varying in the
x
direction
(force-length/length
2
).
k
s
is the shear form factor.
is the Winkler (elastic) foundation modulus (force/length
2
).
k
k
∗
is the rotary foundation modulus (force-length/length).
N
is a compressive axial force.
E
is the modulus of elasticity of the material.
I
is the moment of inertia taken about the neutral axis.
G
is the shear modulus of elasticity.
A
is the cross-sectional area.
M
Ta
is the magnitude of the distributed thermal moment at
x
=
a
.
M
T
/
is the gradient of the thermal moment, linearly varying in the
x
-direction. The moment
is defined as follows:
M
T
=
E
α
TzdA
A
where
T
is the temperature change and
α
is the coefficient of thermal expansion.















Search WWH ::

Custom Search