Information Technology Reference
In-Depth Information
There are now six unknown and six relationships [Eqs. (1), (2), and (3)]. Equation (3) is
called the equation of geometric fit or compatible deformation. It is also referred to as the
kinematic relation
. Equations (1), (2), and (3) give
Wf
3
f
1
+
P
1
=
P
2
=
,
2
f
3
(4)
Wf
1
P
3
=
2
f
3
This solution satisfies both the equations of equilibrium and the equations of compatible
deformations; it is said to be
statically and kinematically admissible
.
Trivial as it may appear, the solution of this example, with the three categories of equa-
tions, the equations of equilibrium, the material law, and the conditions of geometric fit,
contain all of the ingredients of the solution to any general problem in the mechanics of
deformable solids.
f
1
+
The complete set of basic equations (equilibrium equations, strain-displacement relations,
material law equations, and boundary conditions) should be solved. However, for arbitrary
configurations general solutions in closed form do not exist. Nevertheless, for certain types
of structures or structural members, such as beams and plates, approximate theories have
been constructed on the basis of assumptions reflecting their special properties. Usually
these assumptions are made with respect to the distribution of strains or displacements
within the structure, and often they are supplemented by assumptions on the relative
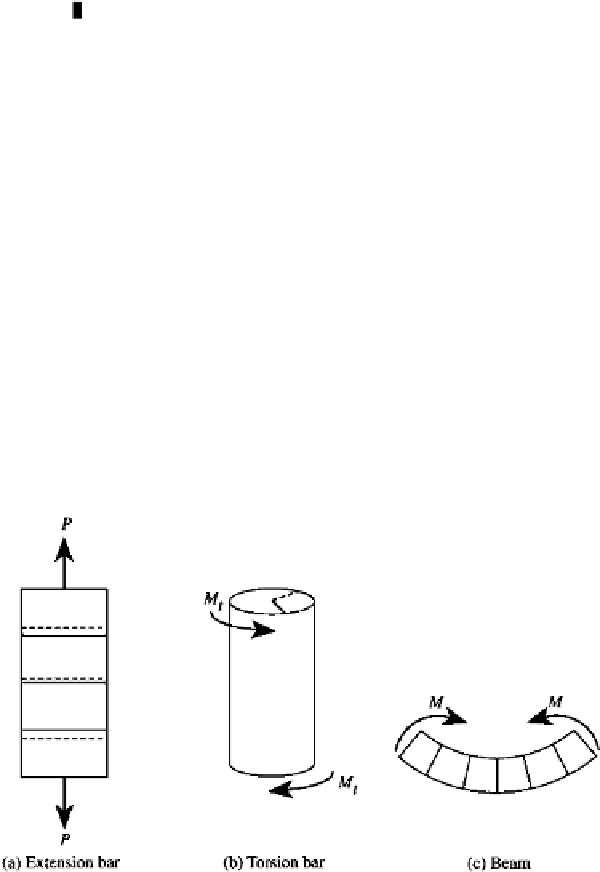
influence of certain stress components. Thus, for the extension and bending of a bar, it
is assumed that transverse cross-sections simply translate and remain planar, respectively,
during deformation (Fig. 1.4). In the case of elementary torsion, it is assumed that the shape
of the cross section remains unchanged, with no distortional effects.
These approximate theories may contain some inconsistencies, such as in the case of the
bending of a bar in which shear stresses are introduced. The strains corresponding to these
stresses lead to deformations that violate the basic deformation assumptions. Solutions
based on the governing equations can do no better than the deformation model permits.
In order to be considered as satisfactory, the approximate theories must lead to solutions
that are within acceptable engineering accuracy for a large class of problems. The respective
FIGURE 1.4
Some basic structural members.










Search WWH ::

Custom Search