Information Technology Reference
In-Depth Information
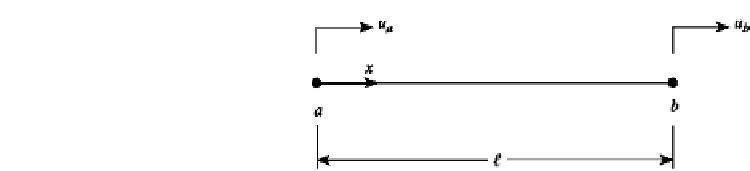
FIGURE 4.10
Bar undergoing axial extension.
EXAMPLE 4.1 Axial Deformation
Derive the stiffness matrix for a bar of cross-sectional area
A
undergoing axial deformation.
The axial end displacements are given by
u
a
and
u
b
as shown in Fig. 4.10. Choose the
polynomial shape function
x
]
u
1
u
=
N
u
u
=
[1
(1)
u
2
In terms of the displacements at ends
a
and
b,
=
=
+
u
a
u
1
,
b
u
1
u
2
(2)
or in matrix notation,
u
a
u
b
10
1
u
1
=
N
u
=
v
u
=
(3)
u
2
Then
1
0
=
N
−
1
u
=
N
−
1
u
u
v
=
Gv
,
G
=
(4)
−
1
/
1
/
and
u
]
v
.
The internal virtual work term for axial motion takes the form
=
N
u
Gv
=
Nv
=
[1
−
x
/
x
/
0
δ
u
k
D
udx
−
δ
W
i
=
(5)
To express this in discrete form,
v
T
G
T
N
u
δ
u
=
δ(
N
u
Gv
)
=
N
u
G
δ
v
=
δ
(6)
From Chapter 2, Example 2.7,
k
D
=
x
dEAd
x
(7)
The element stiffness matrix
k
i
is given by
G
T
0
k
i
N
u
k
D
N
u
dx
G
=
(8)
The term
d
x
N
u
would be equal to [0
1] and
0
1
N
u
x
d
=
With the integral
EA
0
0
1
[0
EA
00
0
N
u
k
D
N
u
dx
=
1]
dx
=
(9)
0







Search WWH ::

Custom Search