Environmental Engineering Reference
In-Depth Information
0
s
m
s
c
,D
0
s
m
s
c
,D
0
s
m
s
c
,D
0
t
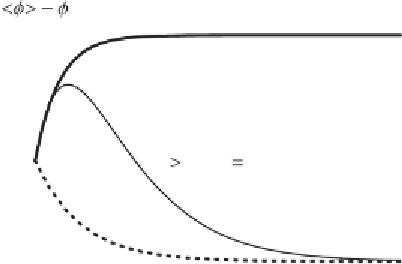
Figure 5.17. Scheme of the possible evolutions of small initial displacement depend-
ing on the noise intensity and the strength of the spatial coupling.
that noise-induced instability is transient, in the sense that the state
0
is recovered in
the long term. This behavior is shown by the thin continuous curve in Fig.
5.17
:Noise
initially induces a growth (i.e., an instability) of
φ
φ
,butfor
t
→∞
the difference
|
φ
−
φ
0
|
tends to zero. This behavior (i) explains why this mechanism is called
short-term instability
and (ii) suggests that the steady-state pdf of
φ
is expected to be
unimodal, with the mode at
φ
0
,evenwhen
s
m
exceeds the threshold
s
c
.
We now consider spatiotemporal dynamics (i.e.,
D
=
0). Differently from the
subcritical case, when
s
m
>
s
c
, the spatial coupling introduces qualitative changes with
respect to the zero-dimensional case. In fact, for suitable values of the strength
D
of the
coupling, the spatial term in Eq. (
5.31
) takes advantage of the noise-induced short-term
instability that also exists in the spatiotemporal dynamics (in fact,
∂
φ
/∂
t
d
φ
/
d
t
for
t
from decaying to zero. As a
consequence, the spatial coupling locks the system in a new ordered state, with
→
0) and prevents the displacement
|
φ
−
φ
0
|
φ
different from
φ
0
and variable in space. In this case the temporal trajectory of
φ
does
not exhibit a convergence to
, as shown by the thick curve in Fig.
5.17
.
Thus the spatial coupling is responsible for maintaining the dynamics away from the
state
φ
0
for
t
→∞
0
. Before investigating the behavior of some prototype models, we describe in
Box 5.5 an analytical tool used to detect the possible presence of short-term instability
in stochastic dynamical systems.
Once the short-term instability has been detected, the ability of spatiotemporal
stochastic dynamics (
B5.5-1
) to give rise to periodic patterns is typically investigated
by the prognostic tools described in Boxes 5.1, 5.2, and 5.3.
φ
5.4.1 Prototype model
To illustrate howpattern formation can be induced bymultiplicative noise, we consider
the prototype model:
∂φ
∂
3
D
(
k
0
+∇
2
)
2
t
=
a
φ
−
φ
+
φξ
gn
−
φ,
(5.34)






Search WWH ::

Custom Search