Information Technology Reference
In-Depth Information
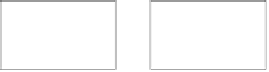
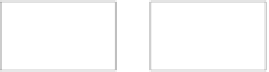
Camera 1
Classifier
training for
each object
Moving object
segmentation
Calculating
image features
Trained
classifiers
Camera 2
Identification
of objects with
classifiers
Moving object
segmentation
Calculating
image features
Fig. 12.10
Scheme of the multi-camera object identification algorithm
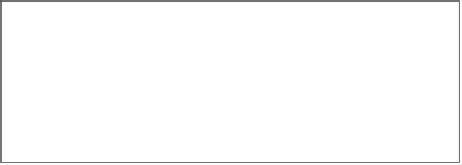
i
th objects for matching from among
NO
objects,
I
ij
,
j
=
1
...
NI
i
represents
j
th
image of the
i
th object out of
NI
i
images of
O
i
and
V
ijk
,
NV
ij
defines
k
th
image feature vector of the image
I
ij
from among
NV
ij
vectors. In case of majority
of image features, there is only one feature vector for each object image; however,
in case of local image features, there is one feature vector for each of multiple key
points found automatically in the image. The relation between objects, images and
feature vectors are illustrated in Fig.
12.11
. During the re-identification stage, all
feature vectors
V
ijk
of every image of all objects found in the destination camera
C
2
are classified with the chosen classifier that represents the object
S
observed in the
source camera
C
1
.
The result of each classification consists of three values: (1) the binary decision
d
ijk
denoting whether the feature vector
V
ijk
belongs (positive decision), or not (neg-
ative decision), to the object of interest
S
; (2) the response
r
ijk
∈[
k
=
1
...
representing
the similarity of vector
V
ijk
to the object of interest
S
; (3) the weight
w
ijk
>
0
,
1
]
0 that
represents the classifier response reliability. The formulas for obtaining decision,
response and weight values for each classifier type are presented in Table
12.3
.
Classification result
s
for all vectors of the image
I
ij
are aggregated in order to
obtain the mean result
r
ij
for an image according to the equation:
⊧
⊨
NV
ij
k
=
0
r
ijk
·
w
ijk
for positive
d
ijk
NV
ij
r
ij
=
(12.31)
NV
ij
k
=
0
−
(
⊩
1
−
r
ijk
)
·
w
ijk
NV
ij
for negative
d
ijk













Search WWH ::

Custom Search