Biomedical Engineering Reference
In-Depth Information
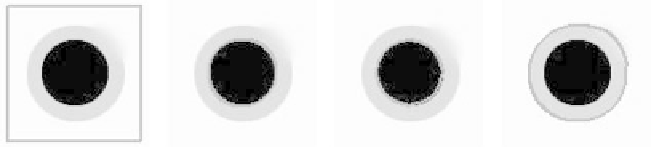
Figure 10.16: Diffused region force on weak edge. From left: the edge map,
the stopping function
g
(
·
) of edge map, the magnitude of its gradient
∇
g
(
·
), the
region segmentation map, and the vector map of the diffused region force
R
.
10.9.2 Neighboring Weak/Strong Edges
The next experiment is designed to demonstrate that both the standard geo-
metric snake and the GGVF snake readily step through a weak edge to reach a
neighboring strong edge. The test object in Fig. 10.17 contains a prominent cir-
cle inside a faint one. The presence of the weaker edge at the outer boundary is
detected only by the RAGS snake. The geodesic snake fails because the weaker
outer boundary allows the whole snake to leak through (similar to but in the
opposite direction of propagation in Fig. 10.15). The GGVF snake fails due to
the strong gradient vector force caused by the inner object boundary. Practical
examples of this can also be observed in most of the real images shown later,
such as Figs 10.20 and 10.26.
10.9.3 Testing on Noisy Images
We also performed comparative tests to examine and quantify the tolerance to
noise for the standard geometric, the geometric GGVF, and the RAGS snakes.
For this a harmonic shape was used as shown in Fig. 10.18. It was generated
Figure 10.17: Strong neighboring edge leakage. From left: initial snake,
geodesic snake steps through weak edge in top right of outer boundary, GGVF is
attracted by the stronger inner edge, and RAGS snake converges properly using
extra region force.