Biomedical Engineering Reference
In-Depth Information
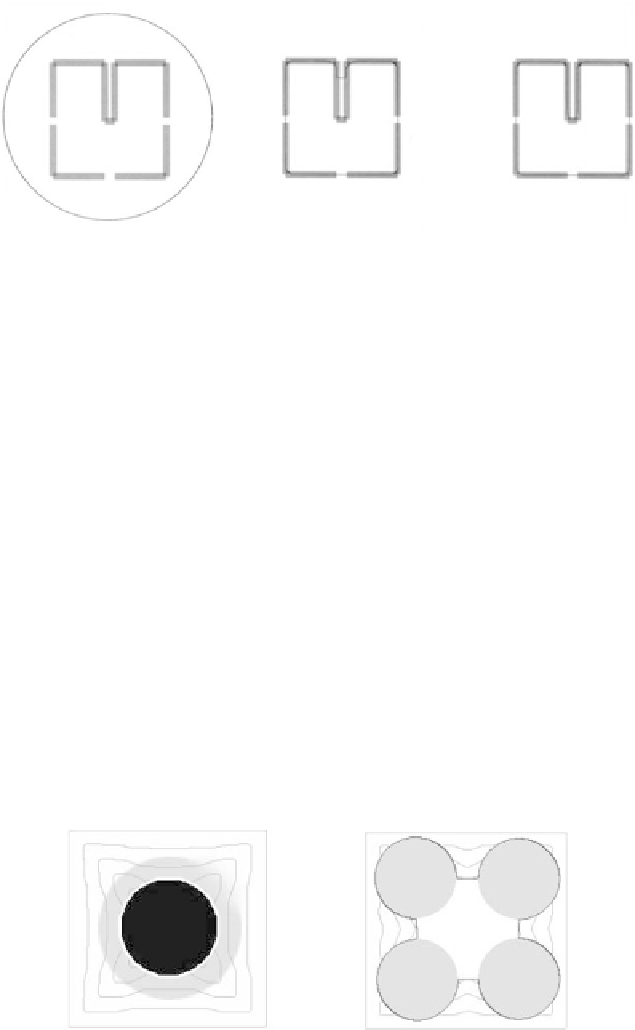
Figure 10.10: Concavity convergence comparison. From left: initial snake, GVF
snake result, and GGVF snake result, from [9].
that contours can converge into long, thin boundary indentations. The GGVF
preserves clearer boundary information while performing vector diffusion, while
the GVF will diffuse everywhere within image. As shown in Fig. 10.10, the GGVF
snake shows clear ability to reach concave regions.
Later in [10], Xu
et al
. showed the GGVF equivalence in a geometric frame-
work. A simple bimodal region force generated as a two-class fuzzy membership
function was added to briefly demonstrate weak-edge leakage handling. The ge-
ometric GGVF snake is useful when dealing with boundaries with small gaps.
However, it is still not robust to weak edges, especially when a weak boundary
is close to a strong edge, the snake readily steps through the weak edge and
stops at the strong one. This is illustrated in Fig. 10.11 (left).
A further problem with the GGVF snake is that it does not always allow the
detection of multiple objects. These topological problems arise, even though
Figure 10.11: GGVF weaknesses. Left: The GGVF snake steps through a weak
edge toward a neighboring strong one (final snake in white). Right: It also can
encounter topological problems (final snake in black). The evolving snake is
shown in a lighter color in both cases.