Biomedical Engineering Reference
In-Depth Information
in expressions (7.11) and (7.12) have to be properly chosen to guarantee the
advance over narrow regions. However, parameters choice remains an open
problem in snake models [31]. This problem can be addressed by increasing the
grid resolution as it controls the flexibility of T-surfaces. However, this increases
the computational cost of the method.
To address the trade-off between model flexibility and the computational
cost, in [22, 29] we propose to get a rough approximation of the target surfaces
by isosurfaces generation methods. Then T-surfaces model is applied.
The topological capabilities of T-surfaces enable one to efficiently evolve the
isosurfaces extracted. Thus, we combine the advantages of a closer initializa-
tion, through isosurfaces, and the advantages of using a topologically adaptable
deformable model. These are the key ideas of our previous works [22, 29]. We
give some details of them.
At first, a
local scale property
for the targets was supposed: Given an object
O
and a point
p
∈
O
, let
r
p
be the radius of a hyperball
B
p
which contains
p
and
lies entirely inside the object. We assume that
r
p
>
1 for all
p
∈
O
. Hence, the
minimum of these radii (
r
min
) is selected.
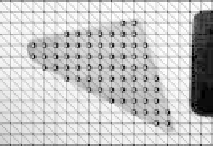
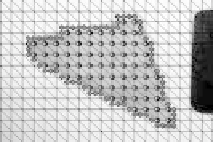
Thus, we can use
r
min
to reduce the resolution of the image without losing the
objects of interest. This idea is pictured in Fig. 7.8. In this simple example, we
have a threshold which identifies the object (
T
<
150), and a CF triangulation
whose grid resolution is 10
×
10.
Now, we can define a simple function, called an
object characteristic func-
tion
, as follows:
χ
(
p
)
=
1
,
if
I
(
p
)
<
T
,
(7.27)
χ
(
p
)
=
0
,
otherwise
,
where
p
is a node of the triangulation (marked grid nodes on Fig. 7.8(a)).
(a)
(b)
Figure 7.8:
(a) Original image and characteristic function. (b) Boundary
approximation.