Information Technology Reference
In-Depth Information
to measure the appropriateness of the more complex emergent behavior is much
more dicult. Robot behavior is encapsulated in its trajectory [55] and several
numerical values can be defined to measure the properties of the trajectory [59].
However, as far as we know, there is not a standard quantitative way to measure
the performance of the system by means of behavior assessment. This is probably
the main weakness of the field of Intelligent Robotics and Autonomous Systems.
The approach taken in this paper has been to perform two sets of experi-
ments. First, to evaluate the robustness of the landmark identification processes,
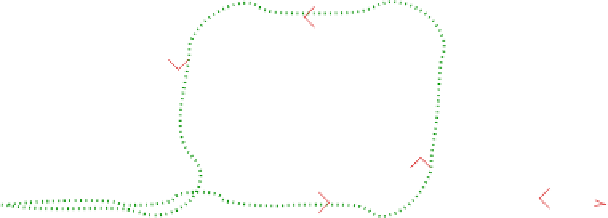
the robot has been programmed to perform the route in Fig. 7; however before
returning to corridor number one, three turns were to be made. Each trial then
consisted of repeating the main loop in the center of the area three times before
returning to the initial corridor, a path of about 300m. The experiment has been
performed in both senses, clockwise (CW) and counter clockwise (CCW), four
times each. This experimental bed sums a total of about 160 minutes for the
robot to successfully identify the landmarks. Figure 8 shows the robot's view-
point of the environment. Figures 8(a) and 8(b) were obtained in triple tours
using the compass to build the maps, while Figs. 8(c) and 8(d) show the maps
obtained in single tours, using pure odometric information.
Secondly, the performance of the door identification process had to be eval-
uated. We labeled doors on the right of the walls (in the direction of the tour)
with even numbers and doors on the left with odd numbers. Then we placed
the robot at the beginning of each corridor. The robot was, at each run, sent
to each door number in the corridor and the robot signaled the goal door by
going backwards for a short while when reaching it. Prior to sending the robot,
the operator ensured all the doors in the corridor were closed. The experiment
was repeated several times in each corridor without failure; more than 200 doors
successfully identified. Figure 9 shows a typical plot reflecting the state of the
landmark identification processes during a tour.
CW (dotted)
CCW (solid)
Corridor_2
eep
eep
(terrace)
Hall_1
Hall_2
Corridor_3
Corridor_4
Corridor_1
Fig. 7.
Robot environment and the nominal trajectory for the task.







Search WWH ::

Custom Search