Information Technology Reference
In-Depth Information
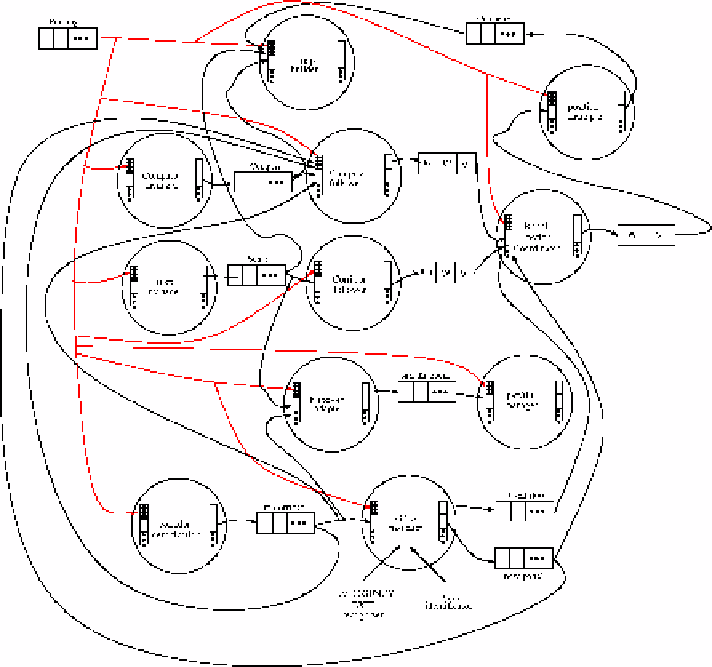
the state reflected by the corridor identification behavior. The link between the
door identification
behavior and the
motion coordinator
is meant to make the
robot stop for a while when it reaches the goal door.
As oces are mainly located in corridors, while traversing them, the robot
fixes the camera's parameters according to the oce number it has to look
for. On the other hand, when navigating in a hall, the emergency exit panel
identification system is activated, actively adapting tilt and zoom values to better
perceive them, and defining a new compass orientation to follow when a panel is
identified. Each landmark identification process defines, through the confidence
level, the activation function of the behavior itself.
3.5 Empirical Evaluation of the Architecture
Although all the modules developed were incrementally built and tested, the
adequacy of the overall control architecture still needs to be measured. When a
single behavior is to be evaluated, the most straightforward method is to run an
experiment several times and give the overall performance. On the other hand,
Fig. 6.
Overall view of the control architecture.
Search WWH ::

Custom Search