Information Technology Reference
In-Depth Information
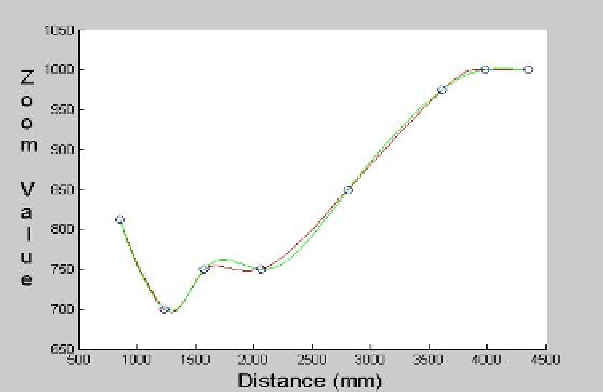
Fig. 5.
B-spline for zoom adjustment.
Although low level navigational skills do not depend on the higher level
landmark detector systems, each behavior was designed taking the robot's task
into account. Through the user interface the robot receives the number of the
oce as input data and it looks for the oce navigating through corridors and
halls.
As Mataric says in [51], any solution superior to random walk needs inter-
nal information on the robot's current location, the desired goal location and
the relationship between both of them. With our corridor identification behav-
ior
Galtxagorri
has the ability to locate itself in the environment. The desired
goal location is expressed in terms of the number of doors the robot has to find
and accomplished by the
wooden door identification
behavior. However, what is
the navigational method that guides the robot from its starting position to the
goal location? At this development state of the control architecture, the robot
performs the recognition-triggered response method, connecting different loca-
tions by means of local navigation algorithms. Thus, appropriately sequencing
different recognition-triggered responses, the robot follows a pre-defined route.
This navigational method has been implemented by means of small finite-state
automata (FSA) integrated in each behavior, associating the sequence of land-
marks with actions that guide the robot to the direction of the goal. Therefore,
behaviors keep track of the state and subgoals to which they are concerned.
The task is performed by means of inter-process communication while the robot
interacts in a real environment. Figure 6 shows the overall view of the control
architecture. Each behavior is represented by a circle and is a
SORGIN
process.
The modules labeled as “manager” are directly related to hardware, and are only
responsible for reading from or writing to this device. The video manager is an
exception due to the nature of the data it captures, and it is the behavior that
performs wood identification or emergency exit panel recognition depending on
Search WWH ::

Custom Search