Information Technology Reference
In-Depth Information
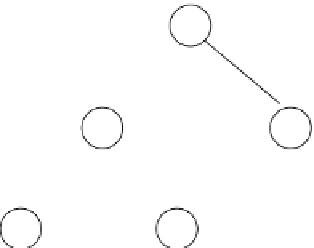
A (500, 800)
B1 (100, 300)
B2 (800, 1000)
C1 (0, 100)
C2 (300, 500)
FIGURE 1.7
An example of an RCT.
Compared with traditional AVLs, each node of the RCT manages a
range of values, instead of a single value. Each node only needs to main-
tain its connection with direct child nodes and a parent, and operations
like registration, updating, and querying can start from any node. Unlike
the traditional AVL structure, higher-level nodes of RCT are not required
to maintain more information or bear more load than those in lower lev-
els, which provide the basis for RCT to scale easily.
Suppose
D
is the value domain of the PA of an RCT. Each node
n
of an
RCT is responsible for a subrange of
D
, or
D
n
. All resources with PA values
belonging to
D
n
register themselves to node n. We name each RCT node an
HR (head of a subrange). The terms “HR
n
” and “node
n
” will be used
interchangeably in the rest of this chapter. In Figure 1.7, the circles denote
HRs, while the squares below an HR denote computational resources regis-
tered with an HR.
Suppose
N
is the total number of HRs in an RCT, and lc(
n
) and rc(
n
) are
the left and right child nodes of HR
n
, respectively. Since an RCT is a
binary search tree, the following observations can be found:
D
i
∩
D
j
= j,
∀
i
,
j
Π[1,
N
]
(1.1)
D
lc(
i
)
<
D
i
<
D
rc(
i
)
,
∀
i
Π[1,
N
]
(1.2)
D
i
<
D
j
if the upper bound of
D
i
is less than the lower bound of
D
j
; for
example, [1, 2] < [3, 4].
If the ranges of node
i
and node
j
, that is,
D
i
and
D
j
, are adjacent, node
i
is
referred to as a neighbor of node
j
, and vice versa. If node
i
is a neighbor
of node
j
and
D
i
<
D
j
, node
i
is called the left neighbor of node
j
(denoted
by L-neighbor(
j
)) and node
j
is called the right neighbor of node
i
(denoted
by R-neighbor(
i
)). Note that there are two exceptions: the leftmost HR and






















Search WWH ::

Custom Search