Geoscience Reference
In-Depth Information
RR
T
x
=−
ω
×
x
⎛
⎞
0
ω
3
−
ω
2
⎝
⎠
.
⇒
=
(
−
ω
×
)
=
−
ω
3
0
ω
1
C
(67)
ω
2
−
ω
1
0
In order to express
in terms of the elements in
C
,Eq.(
66
) requires us
to find a representation of the rotation matrix
R
. For this purpose, it is of benefit
to introduce a body-fixed Intermediate Reference System [IRS, equivalent to the
nutation system
used by Moritz and Müller (
1987
)], characterized by its origin and
reference axis being that of the GCRS. Thus, the pole of the IRS is the CIP. If we
further suppose that the intermediate system is rotating about its reference axis at
constant rate
(ω
1
,ω
2
,ω
3
)
, the transformation matrix
U
, relating corresponding position vectors
in the GCRS (subscript
i
) and the uniformly rotating IRS (subscript
u
), reads
Ω
x
u
=
Ux
i
(68)
⎛
⎞
cos
Ω
t
sin
Ω
t
0
⎝
⎠
,
U
=
−
sin
Ω
t
cos
Ω
t
0
(69)
0
0
1
see Fig.
10
for a graphical illustration of this relationship. Similar to the theoretical
build-up of Sect.
2.2
, the Earth's initial dynamical state, which is not perturbed by any
time-dependent forces, is assumed to be that of uniform rotationwith angular velocity
Ω
around the polar axis of the TRS (Gross
1992
). In this initial state, the TRS perfectly
coincideswith the IRS. However, if dynamical processes, such asmass redistributions
and relative motions within Earth's mobile fluids, are allowed for, the orientation and
y
(t
)
1
x
u
2
y
u
x
P
TRS
p
2
p
1
= P
IRS
= CIP
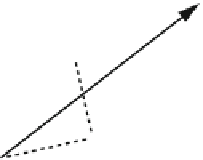
Fig. 10
Reference poles and axes in a tangential polar plane. The IRS (subscript
u
) rotates steadily
with respect to the space-fixed GCRS (subscript
i
), while the TRS and the instantaneous rotation
vector deviate from uniform rotation due to the presence of geophysical perturbations