Information Technology Reference
In-Depth Information
s
t
+1
(
c
i,j
)=(
s
t
(
c
i,j−
1
)
⊕s
t
(
c
i,j
+1
)
⊕
1)
⊗
(
s
t
(
c
i−
1
,j
)
⊕
2)
⊗
(
s
t
(
c
i
+1
,j
)
⊕
2) (12)
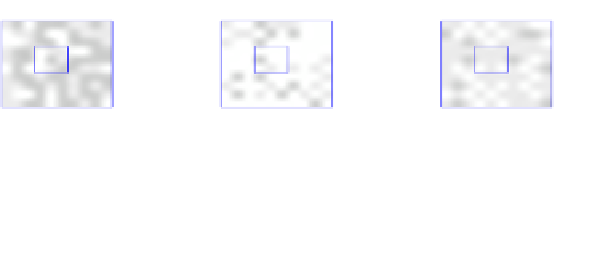
The subregion
ω
where the cell states coincide with
s
d
appears clearly in the
final CA configuration at
T
= 16 (Fig. 2).
time=0
time=3
time=8
w
time=12
time=15
time=16
Fig.2.
Configurationsofthe2-DCAgovernedbyrule(12)atseveraltimes.Starting
withagiveninitialconfiguration,regionalcontrollabilityisguaranteedon
ω
at
T
=16.
Thewhite,grayandblacksquaresrepresentcellsstates0,1and2,respectively.
ω
is
thesurroundedareaconsistingof3
×
3cellsandrepresentedbygraysquares
5.2ControlProblem
We consider in this section the problem of finding a control value
u
t
at each time
t
that disturbs a given local cellular automaton rule in order to achieve regional
controllability on a subregion
ω
of the lattice
L
. We examine also one and two
dimensional cases and give explicit forms of controls.
OneDimensionalExample.
Let consider a lattice formed by
N
= 40 cells
indexed as
c
i
,
i
=1
,···,N
. Each state cell takes its value in
S
=
{
0
,
1
,
2
}
and
is updated according to the states of
N
(
c
i
)=
{c
i−
1
,c
i
,c
i
+1
}
subject to the
following transition function
f
(
s
t
(
N
(
c
i
))) =
f
1
(
s
t
(
N
(
c
i
))) +
u
t
(
c
i
0
)
(13)
where
f
1
is a totalistic rule defined by
f
1
(
s
t
(
N
(
c
i
))) =
s
t
(
c
i−
1
)
⊕s
t
(
c
i
)
⊕s
t
(
c
i
+1
)
(14)
and
u
t
is a control assumed to be active only on cell
c
i
0
. The regional con-
trollability problem is considered with
ω
=
{c
11
,···,c
20
}
and
s
d
defined by