Information Technology Reference
In-Depth Information
(a) no reservation of first cell; gap >= 3*v; vmax = 3
study simulation
(b) no reservation; gap > 3*v; vmax = 3
study simulation
2000
2000
1500
1500
1000
1000
500
500
0
0
0
500
1000
1500
2000
0
500
1000
1500
2000
flow of opposing lane(s) [veh/h/lane]
flow of opposing lane(s) [veh/h/lane]
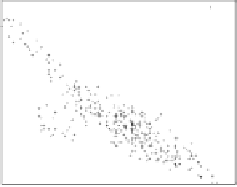
Fig. 3.
Different yield rules. LEFT: Vehicles accept turn if
g
≥
3
v
. RIGHT: Vehicles accept turn
if
g>
3
v
. Note the large difference in the congested regime.
moving. The resulting differences in fundamental diagrams (see Fig. 3) are enormous.
The latter turns out to model “zip-lock” dynamics, which is in fact the desired behavior
under congested conditions.
In protected turns during the green phase as well as for unprotected turns which have
the priority (such as a freeway link connecting to another freeway link at the position
of an off-ramp), care has to be taken that free traffic flows unobstructed through the
connection. This means, for example, that for CA logic with
v
max
>
1
,upto
v
max
cells
of the outgoing link need to be considered.
Care has also to be taken when different incoming links compete for space on the
same outgoing link. Although in principle the prioritization given by traffic rules should
take care of this, in practice such conflicts can rarely be completely avoided, for example
because of small network coding errors. In order to have a robust implementation, it is
thus desirable that vehicles reserve cells where they intend to go.
This can again lead to unexpected effects. For example, we noticed above that the
condition
under congested conditions. In
TRANSIMS, however, it turns out that there is in fact no difference at all between the
two rules. Why is that? The answer is that in TRANSIMS, vehicles with velocity zero
on the main road reserve space on the outgoing link on the assumption that they might
accelerate to speed one. In consequence, vehicles from the minor road cannot move to
that same space, even if it turns out that the vehicle on the major road does not move
after all.
In order to find out about such unexpected effects, driving logic should be systemat-
ically tested. In fact, there should be standardized test cases that each micro-simulation
should do and which should be publicly available, e.g. on the internet. A minimum set
of tests would consist of the fundamental diagrams for 1-lane, 2-lane, and 3-lane traffic
(such as Fig. 2 right), and for all unprotected merging movements (such as Fig. 3). Such
tests should be done with the production version of the code so that differences between
the specification and the actual implementation could be detected. These tests should be
available as an easy-to-configure run of the software package, and the results should be
available on the Internet.
g ≥ n × v
is very different from
g>n× v