Information Technology Reference
In-Depth Information
whether two particles “see” each other or whether the interaction is blocked by
some obstacle. All this is not necessary here.
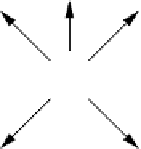
For some applications it is useful to introduce a
matrix of preference
which
encodes the preferred walking direction and speed of each pedestrian. It is a
3
×
3 matrix (see Fig. 3) where the matrix elements
M
ij
can directly be
related
to observable quantities
, namely the average velocity and its fluctuations [11].
M
−
1
,−
1
M
−
1
,
0
M
−
1
,
1
M
0
,−
1
M
0
,
0
M
0
,
1
M
1
,−
1
M
1
,
0
M
1
,
1
Fig. 3.
A particle, its possible transitions and the associated matrix of preference
M
=(
M
ij
).
The area available for pedestrians is divided into cells of approximately 40
×
40
cm
2
which is the typical space occupied by a pedestrian in a dense crowd [20].
Each cell can either be empty or occupied by exactly one particle (pedestrian).
Apart from this simplest variant it is also possible to use a finer discretization,
e.g. pedestrians occupying four cells instead of one.
In contrast to vehicular tra
c the time needed for acceleration and braking
is negligible in pedestrian motion. The velocity distribution of pedestrians is
sharply peaked [21]. These facts naturally lead to a model where the pedestri-
ans have a maximal velocity
v
max
= 1, i.e. only transitions to neighbour cells
are allowed. Furthermore, a larger
v
max
would be harder to implement in two
dimensions and reduce the computational e
ciency.
The stochastic dynamics of the model is defined by specifying the transition
probabilities
p
ij
for a motion to a neighbouring cell (von Neumann or Moore
neighbourhood) in direction (
i, j
). The
transition probability p
ij
in direction (
i, j
)
is determined by the contributions of the static and dynamic floor fields
S
ij
and
D
ij
and the matrix of preference
M
ij
at the target cell:
p
ij
=
Ne
k
D
D
ij
e
k
S
S
ij
M
ij
(1
− n
ij
)
ξ
ij
.
(1)
N
is a normalization factor to ensure
(
i,j
)
p
ij
= 1 where the sum is over the
possible target cells. The factor 1
− n
ij
, where
n
ij
is the occupation number
of the neighbour cell in direction (
i, j
), takes into account that transitions to
occupied cells are forbidden.
ξ
ij
is a geometry factor (obstacle number) which
is 0 for forbidden cells (e.g. walls) and 1 else. The coupling constants
k
D
and