Information Technology Reference
In-Depth Information
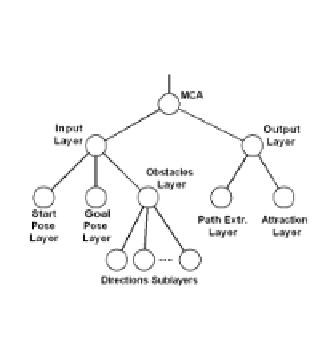
3 Multilayered CA Architecture
The system is composed of five CA layers, each one has three or more dimensions.
They are conceptually grouped in two major subsystems: an Input Layer and
an Output Layer (Fig. 1.a). The Input Subsystem is thought as an interface
with the outside environment. Its layers have to react as fast as possible to the
”external” changes: the robot starting pose, the robot goal pose, and, the more
important, the changes of the environment, i.e. the movements of the obstacles
in a dynamical world. Through a sensorial system (not described here), these
changes are detected and the information is given to the planner via the Input
Subsystem, even during the updating phase, thus having a reactive planner. The
first two layers (Start and Goal Pose L.) are considered statical, because they are
update only from the outside of the system and with a frequency lower than the
internal updating frequency; the third one (Obstacles L.), instead, is updated
externally and also evolves to search all the admissible movements as described
in section 3.2. The Output Subsystem returns the results of the planning, that is
a)
b)
Fig. 1.
Layers Architecture: a) dependency graph; b) layers hierarchical structure
an entire trajectory (a sequence of passing points) from the Path Extraction L.,
or a single motion step from the Attraction L. In the following subsections, we
briefly describe each layer and the transition functions implemented in its cells.
3.1 Goal Position Layer and Starting Position Layer
The
Goal Position Layer
specifies the goal pose of the robot. The attribute
in each cell is a boolean:
GPos
c
∈{True,False}
8
. Each cell
c
contains