Information Technology Reference
In-Depth Information
4.1
A Reconfigurable R
Modalities
Robot That Allows Us to Use Variable Shape and
In the Possessed Robot me
and modalities but also an
sessed Robot method clearl
parts and allows variable sh
two four-axis arms. Each he
of the device to achieve mo
has also two motors on the
tions of the hand.
These devices are attach
are wired and connected to
The total axes of the kit ar
want to turn off the modali
robot stops controlling the
can detach each part and a
signed each part as in Fig.
humanlike robot by turning
ethod, we can evaluate not only the humanlike robot sh
ny kind of shapes and modalities. For evaluating the P
ly and rapidly, we created a robot kit that has separate bo
hapes and modalities. The kit includes three axis heads
ead has three motors. Each arm has two motors on the r
ovements toward the pitch and yaw directions of the arm
e tip to achieve movement toward the pitch and roll dir
hape
Pos-
ody
and
root
m. It
rec-
hable and detachable by Velcro tapes. Each head and a
a microcomputer, and can be separately turned on and
re sufficient to reproduce normal humanlike robots. If y
ty of the head of the robot, just turn off the switch and
head. If you want a different humanlike robot shape, y
attach it on a different position. In the experiment, we
3 left and compared the communication strategies of
g on and off the head of the robot.
arm
off.
you
the
you
as-
the
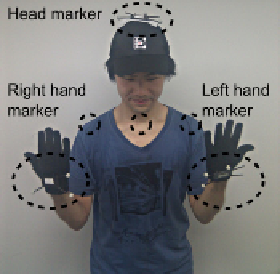
Fig. 3.
Implemented reconfigu
participant
urable robot on PoRoS system and motion capture markers o
on a
4.2
Monitoring Device
Using the Motion Capture System
To use a human as the cont
human manipulator and fee
tem for feedback from the h
move a robot. In this syste
s250e [22]) for tracing the
and converted to robot body
•
troller of the robot, we need to monitor the behavior of
edback the robot with it. We used a motion-capturing s
human manipulator because it is easy to understand how
em, we used seven motion-capturing cameras (OptiTr
human head and hands. Each human body part is captu
y movement as described below:
acts three angles (yaw, pitch, and roll) of the head and
ad movement.
ulated the robot's arm angles (yaw and pitch) by a vec
he hand position.
f the
sys-
w to
rack
ured
Head: The system extra
signs them to the robot's he
•
as-
Arm: The system calcu
from the head position to th
ctor