Information Technology Reference
In-Depth Information
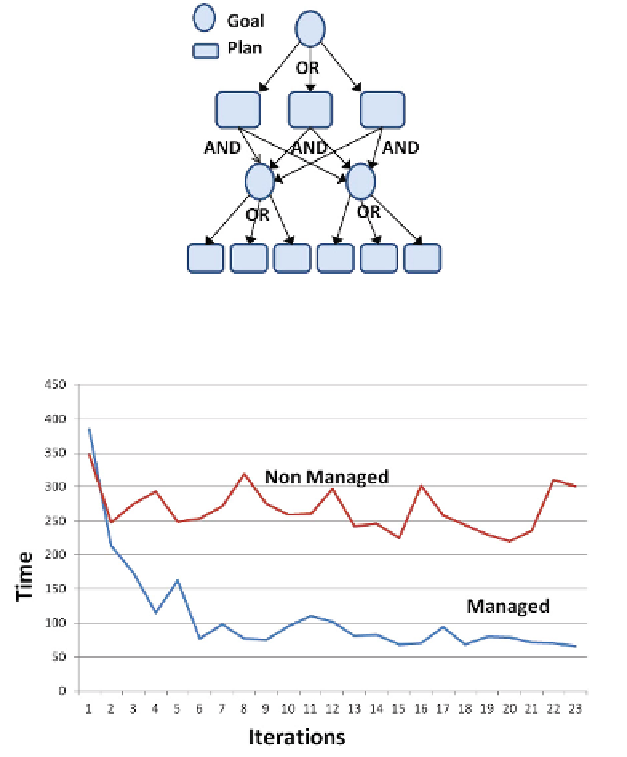
Fig. 2.
Structure of the test program
Fig. 3.
Service selection performance
Figure 3 shows the execution times obtained with
L
=
2 by using component plans
requiring different CPU times for the execution of the service goals they provide, with
and without installing the
Self
-OSGi's GoalManager - rispectively, the managed and
not-managed cases depicted in Figure 3. In the former case, a service ranking compo-
nent assigning greater priorities to previously unexplored plan options was used. The
figure demonstrates how, when
Self
-OSGi was repeatedly asked to achieve the root
goal, it automatically tried new component plan implementations at each iteration, ulti-
mately converging on the best policy to achieve the root goal in the shortest time.
With the same setup used in the robotic example, the overhead imposed by the
Self
-
OSGi service management (performance measurement and proxy mechanisms) was
measured by comparing the time needed to achieve the root service goal with and