Information Technology Reference
In-Depth Information
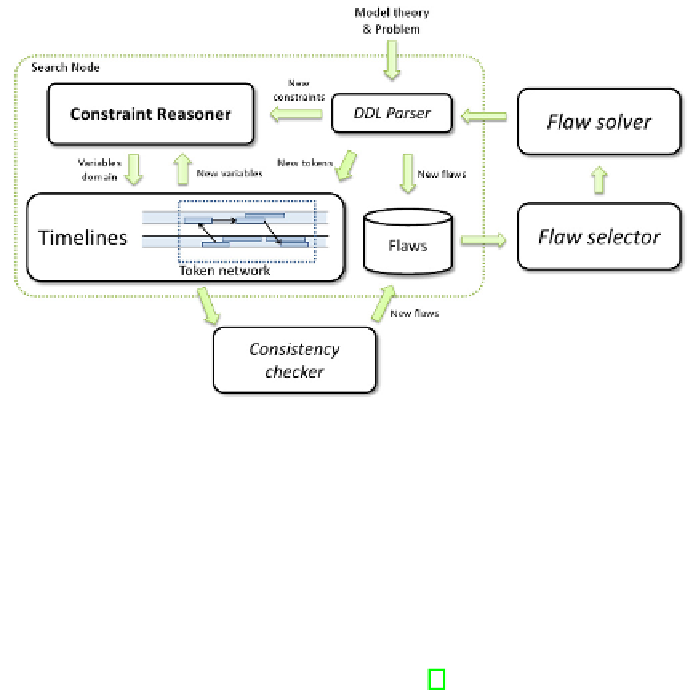
Fig. 1.
J-
TRE
architecture. The planner collects flaws, selects one of them and solves it by exe-
cuting some DDL code. The planning process will stop in a search space node without flaws.
values overlapping on a state variable, reusable resource oversubscriptions, consumable
resources overproductions or overconsumption, etc. Each time a new node of the search
space is created or new constraints are added to the current search space node, a
check
consistency
routine is called on each object of the domain and, depending on the ob-
ject itself, further flaws can be added to the current search space node. This procedure
is required in order to remove any further inconsistencies from the timelines
scheduling
tokens in time. This technique has been introduced in [4], in which state variables are ob-
served as resources over time and contentions peaks over their continuous representation
are removed by adding precedence constraints among tokens.
While, in our system, there is almost no difference in
which
flaw is solved first (as far
as we ignore efficiency aspects) because they all have to be solved sooner or later, there
could be serious troubles in
how
they are solved, especially in case of cyclic problems.
Consider, for example, a simple state variable having
At
(
l,s,e
)
and
GoingTo(l,s,e)
as allowed values. Moreover there is a compatibility for predicate
At
that requires for
each token to start at 0
or
to be met by a
GoingTo
token with same location. Fi-
nally, a compatibility for predicate
GoingTo
that requires for each token to be met by
a predicate
At
. We have an initial state with a token
At
(
l
0
,
0
,
[1
,
+inf])
and a goal
At
(
l
3
,
[0
,
+inf]
,
[1
,
+inf])
. The planner has to apply related compatibility for the goal
token producing a sub-goal
GoingTo
(
l
3
,
[0
,
+inf]
,
[1
,
+inf])
than another sub-goal
At
(
l,
[0
,
+inf]
,
[1
,
+inf])
that can unify with first token or apply another compatibil-
ity resulting in another
GoingTo
(
l,
[0
,
+inf]
,
[1
,
+inf])
possiblyleadingtoaninfi-
nite loop planning about the agent going walking around. In short, although scheduling
search space, however exponential, is always finite, it can be the case that compatibility
application space is infinite.
Although a crafty strategy does not exist yet (exception made for some work by Bernar-
dini [15]) the idea we have pursued is to proceed in depth on the search space maintaining