Information Technology Reference
In-Depth Information
6000
4500
3000
GRANELLI
SEET
Our approach
1500
0
120
240
360
480
Fig. 5.
Path Discovery Time (PDT) for all three algorithms. X-Axis gives the number of path
searches, y-axis gives the time in ms. G
RANELLI
does not reschedule when no suitable successor
vertex for the shortest path can be found. By increasing the number of vertices in the graph, PDT
gets lower for S
EET
and our approach.
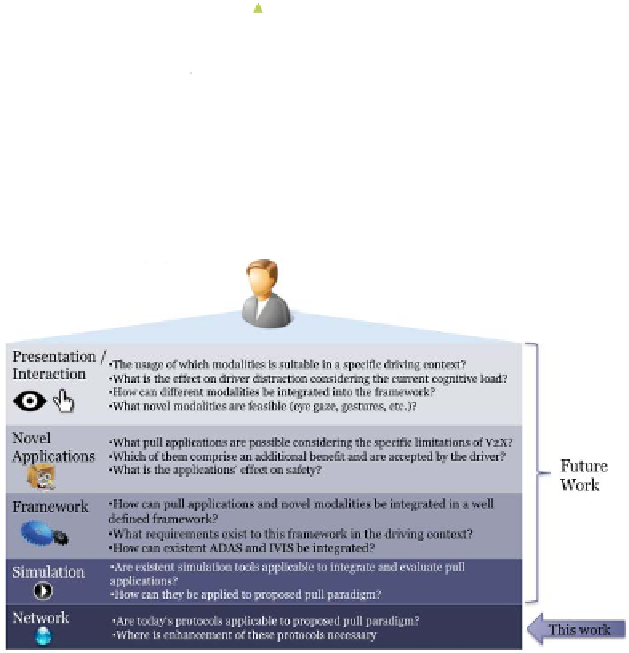
Fig. 6.
Context of this work: Embedded in a framework for developing novel V2X enabled appli-
cations
lower PDR. As our approach also takes local information about graph operations in
G
(the vehicular ad-hoc network) into account, it scores higher PDR than both S
EET
and
G
RANELLI
. The results are statistically significant (
p<.
001
according to a
χ
2
test
).
However, by means of PDT, G
RANELLI
is superior to S
EET
and our approach. Both,
S
EET
and our approach re-schedule path searching in a vertex when no suitable succes-
sor vertex could be identified for the shortest path (see Section 3). G
RANELLI
's behav-
ior in such a situation is to greedily select a next vertex out of the neighboring vertices
and do no re-scheduling at all. This also justifies low PDR for G
RANELLI
. Interestingly,