Environmental Engineering Reference
In-Depth Information
(a)
(b)
(c)
(d)
(e)
(f)
(g)
(h)
(i)
(j)
(k)
(l)
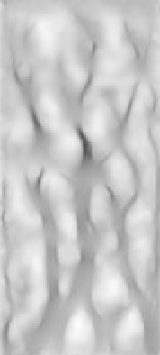
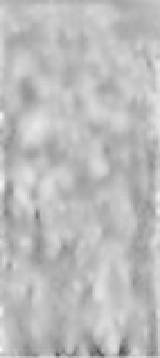
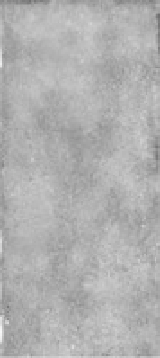
Figure 4.7
Plan views of the soil's surface in the Leicester flume. Darker areas have lower elevation. Top row: 15
◦
slope (a) X11
(calibrated) (b) X11 simulated by RillGrow 2; (c) X14 (d) X14 simulated. Middle row: 10
◦
slope (e) X13 (f) X13 simulated; (g) X16
(h) X16 simulated. Lower row: 5
◦
slope (i) X15 (j) X15 simulated; (k) X12 (l) X12 simulated (Reproduced with permission from
Favis-Mortlock
et al
.).
The evidence does indeed seem to support the twin
ideas that:
(e.g. RillGrow 2), it seems that the models, while still
relatively simple, are nonetheless capable of reproducing
realistic facsimiles of some of the complex features of
real environments.
What we do not know, and perhaps can never know, is
the extent to which such models capture the fundamen-
tals, the underlying essences of the process relationships
which create real landscapes. Because of the spectre of
'model equifinality' (Beven, 1989) it is possible that even
the most perfect resemblance between model and reality is
merely due to chance.
19
Oreskes
et al
. (1994: 641) went so
self-organizing systems can give rise to complex patterns
and relationships which are not necessarily the result of
complex processes; and
•
CA approaches can be used to model such systems, and
these models need not themselves be complex.
•
This is a most optimistic conclusion! Cellular automa-
ton models of systems in which self-organization is
assumed to occur need only be simple at the 'compo-
nent' level, yet are still capable of producing a great
wealth of complex, emergent responses. When such
models are designed to use realistic real-world values
19
At the deepest level, why should mathematics be of any value at
all in describing the world? See Wigner (Note: 1960).











Search WWH ::

Custom Search