Environmental Engineering Reference
In-Depth Information
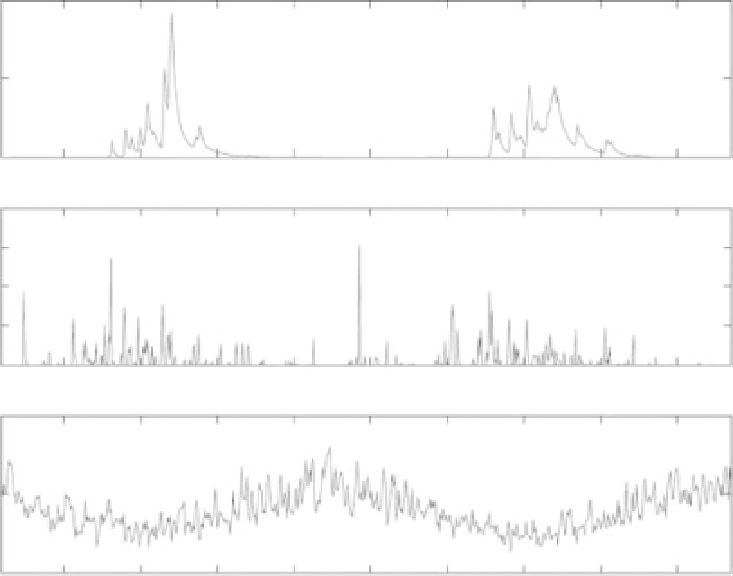
Flow, Rainfall and Temperature: Canning River, W.A., 1985-1987.2
4
2
0
1985.4
1985.6
1985.8
1986
1986.2
1986.4
1986.6
1986.8
1987
60
40
20
0
1985.4
1985.6
1985.8
1986
1986.2
1986.4
1986.6
1986.8
1987
40
20
0
1985.4
1985.6
1985.8
1986
1986.2
Date
1986.4
1986.6
1986.8
1987
Figure 7.1
Daily rainfall, flow and temperature data for the ephemeral Canning River in Western Australia for the period 23 March
1985 to 26 February 1987.
soil, so that when rainfall occurs it is quickly absorbed and
does not lead to any streamflow. In the winter, however,
the soil-water storage is quickly replenished by the heavy
rainfall and the stream flows strongly for a few months.
Clearly, any model of the rainfall-flow dynamics must be
able to characterize this nonlinear behaviour.
Young
et al
. (1997) show that, in this example, the most
appropriate generic model form is the nonlinear SDP
model (see above, Section 7.5). Analysis of the rainfall-
flow data in Figure 7.1, based on this type of model, is
accomplished in two stages. Although the objective is to
model eventually in continuous-time terms, nonparamet-
ric estimates of the SDP nonlinearities are obtained more
conveniently at first using a discrete-time state dependent
parameter auto-regressive exogenous variable (SDARX)
model form, where the flow is modelled by a linear
regression based on past flow and rainfall measurements
(see Young, 2001a, b in which it is discussed at some
length within a rainfall-flow context). However, unlike
simple regression models, the SDARX is characterized
by parameters that are not constant but assumed to be
functions of another variable
Z
k
, i.e.
y
k
=
a
1
(
z
k
)
y
k
−
1
+
a
2
(
z
k
)
y
k
−
2
+···+
a
n
(
z
k
)
y
k
−
n
+
b
0
(
z
k
)
r
k
−
δ
+···+
b
m
(
z
k
)
r
k
−
δ
−
m
+
e
k
z
k
p
k
+
=
e
k
(7.1)
where:
z
k
=
···
r
k
−
δ
···
[
y
k
−
1
y
k
−
2
y
k
−
n
r
k
−
δ
−
m
]
b
m
(
z
k
)]
T
p
k
=
[
a
1
(
z
k
)
a
2
(
z
k
)
...
a
n
(
z
k
)
b
0
(
z
k
)
...
2
) is assumed, for theoretical purposes,
to be white noise, i.e. a normally distributed zero mean,
serially uncorrelated sequence of random variables with
variance
and
e
k
=
N
(0,
σ
2
. In the present context,
y
k
and
r
k
are, respec-
tively, the measured flow and rainfall and
σ
is a pure
advective time delay. Here, the elements of the triad
[
nm
δ
0bythe
R
T
value and YIC criterion (see Section 7.3.1) and the param-
eters are all assumed initially to be dependent on a state
δ
] are identified as
n
=
2,
m
=
3,
δ
=

Search WWH ::

Custom Search