Biomedical Engineering Reference
In-Depth Information
Network Properties
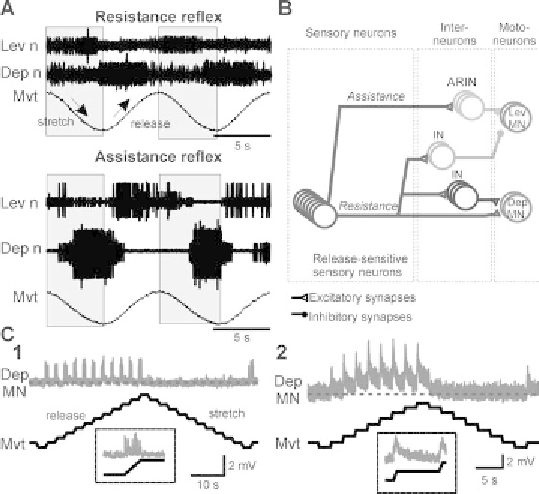
When isolated
in vitro
, the crayfish CNS ei-
ther remains quiescent or produces an automatic
rhythmic locomotor activity (termed 'fictive lo-
comotion'). In the former, a sinewave mechanical
stimulation of the CBCO elicits a typical negative
feedback reflex (Figure 3A), devoted to postural
control, resulting in the cyclic contraction of
muscles that counteract the imposed movements
(similar to the vertebrate stretch reflex; Le Ray &
Cattaert, 1997). So, stretching the CBCO strand
(mimicking leg downward movements) stimulates
the Lev MNs, whereas a CBCO release activates
the Dep MNs. By contrast, during pharmaco-
logically-evoked fictive locomotion, the reflex
response reverses to an assistance reflex that helps
the ongoing movement.
Resistance and Assistance Relexes
During walking, sensory-motor pathways incor-
porate movement-generated information into the
centrally programmed motor program in a cycle-
dependent manner (see Clarac
et al.
, 2000). For
example, during the stance phase, proprioceptive
inputs mainly oppose gravity by strongly activat-
ing the extensor motoneurons, whereas during the
swing phase the same inputs activate principally
the flexor motoneurons in a way that the sensory
information reinforces limb flexion. This means
that the phase of the locomotor cycle determines
the sign of the reflex response.
Figure 3. Sensory-motor integration. (A,B) Network properties. (A) Levator and depressor nerve activity
in resistance and assistance reflexes. (B) Schematic wiring diagram summarizing the different network
components (sensory neurons, interneurons, motoneurons) and the principal connections within this
sensory-motor circuit. C. Motoneuronal reflex responses to imposed ramp movements of the CBCO
strand of a phasic (1) and a phaso-tonic Dep MN (2).
Search WWH ::

Custom Search