Biomedical Engineering Reference
In-Depth Information
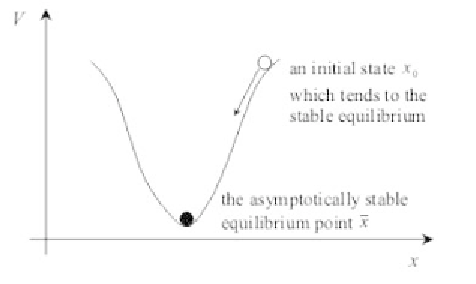
Figure 2. A Lyapunov function allure with a global minimum
Figure 3. A Lyapunov function allure with multiple local minima
ii) if x
(
t
)
is a bounded solution of (1) on
+
Remark 1.
(Moser, 1967): Consider the rather
general nonlinear autonomous system
for which there exists a
>
such that
V
(
x
(
))
=
V
(
x
(
0
))
, then x
(
t
)
is an equilib-
m
x
=
−
f
(
x
)
,
x
∈
,
(9)
rium
m
Then the system (1) is quasi-monostable (di-
chotomic).
where
f
(
x
) =
grad G
(
x
) and
G
:
→
is such
that: (a) it is radially unbounded, i.e.,
lim
G
(
x
)
=
∞
Lemma 2.
If the assumptions of Lemma 1
hold and, additionally,
x
→
∞
|
x
(it
is radially unbounded), then system (1) is quasi-
gradient-like (has global asymptotics).
as
V
(
x
)
→
∞
|
∞
and (b) the number of its critical points is finite.
Under these assumptions any solution of (9)
approaches asymtotically one of the equilibria
(which is also a critical point of
G—
where its
gradient, i.e.,
f
vanishes) and thus the system's
behavior is gradient-like.
Lemma 3.
If the assumptions of Lemma 2 hold
and the set
S
is discrete (i.e. it consists of isolated
equilibria only) then system (1) is gradient-like.




Search WWH ::

Custom Search