Biomedical Engineering Reference
In-Depth Information
The FSM controlling the agents is shown in
Figure 7. It essentially indicates that agents move
in a semi-broad searching pattern looking for
product. Once they find it, they try to transport
it to a chosen a destination, which will be the
destination with the lowest level of product ac-
cording to the beliefs of the first agent to pick up
the product. Of particular interest is the stagnation
recovery process implemented by states
moving to
destination
,
retrying to move
and
moving away.
If the product does not move, the agent will retry
for a short time to move the object. This time is
usually long enough to allow other agents to join
the effort or to gradually change the direction they
are pulling. However, if the problem persists, for
example if the product has hit an obstacle or agents
are pulling in different directions, the agent will
drop the product and move away from it. When
an agent detaches from an object, depending on
the relative position of the product to the agent,
the cohesion behavior often pulls the agent
towards other agents carrying the product and
makes the former go back to the product. This
results in agents reallocating along the product
and altering the forces applied to it. This strategy
has been observed in ants when recovering from
deadlocks and stagnation during the cooperative
transport of large prey (Kube, 2000; Sudd, 1960;
Sudd, 1965).
The collective transport problem presents sev-
eral opportunities to model collective behaviors,
including movements (Rodriguez, 2005). While
transporting the product, agents not only need
to agree on the destination, they also have to
agree on the path to it. Since they are located at
different positions around the object, they might
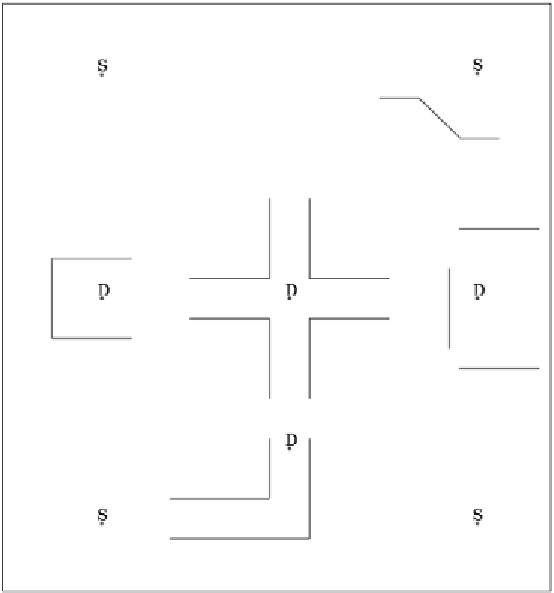
Figure 6. Layout of the obstacles, sources and destinations in a collective transport world. Sources are
spots marked with an 'S' while destinations are marked with a 'D'. Lines are obstacles.
Search WWH ::

Custom Search