Biomedical Engineering Reference
In-Depth Information
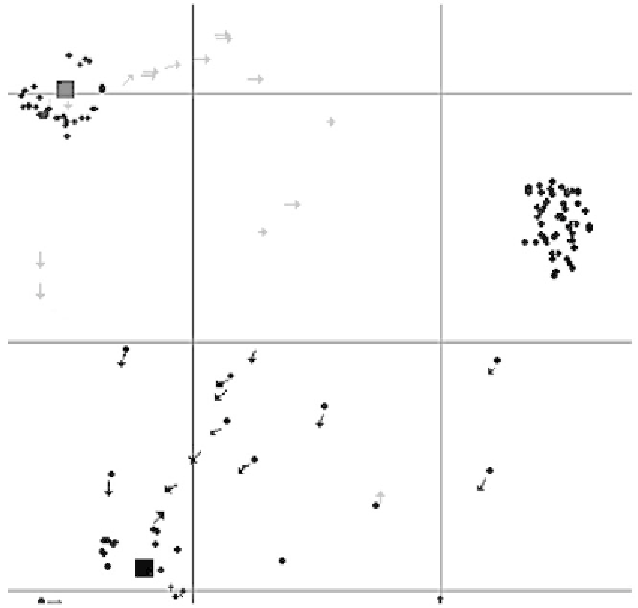
Figure 1. A small section of a 300x300 continuous world with a single “mineral deposit” on the right
and two different teams (dark and light arrows) exploiting it. A unit of distance is the maximum distance
an agent can move during a time-step. Teams' homes are denoted by small solid squares and mineral
units as spots. The dark team agents are returning home carrying minerals (spots adjacent to arrows).
Most agents of the light team are returning to the deposit after unloading minerals at home, but some
of them are simply exploring.
in the environment or the achievement of goals.
This state governs the low-level reactive behaviors
and dynamics, assigning different controllers to
different situations. Movements are governed
by a set of individual influences inspired by the
flocking behavior of migratory birds (Reynolds,
1987, Reynolds, 1999) (avoiding an obstacle or
competing agent, staying with the flock, keeping
the same distance from other agents in the flock,
etc.) that produce an instantaneous velocity in a
desired direction and are combined in order of
priority. By changing which individual influ-
ences are combined and their relative weights,
a large variety of movement behaviors can be
implemented, each one associated with a different
state or goal, guiding the underlying self-organiz-
ing process (Rodriguez, 2004). Notice that the
memory requirements of an agent are limited
to the space required to store a predetermined
number of locations, e.g. the agent's home and
the location of the most recently observed deposit
of minerals.
This two-layer controller allows the designer
of the system to directly incorporate the logic of
Search WWH ::

Custom Search