Biomedical Engineering Reference
In-Depth Information
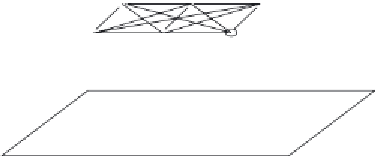
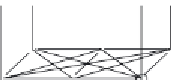
Figure 10. The hexapod rolling tripod gait. (a) A statically standing cockroach. (b) The coupled archi-
tecture. (c) ~ (h) Numerical results of the upper layer flexor neurons correspond to macroneurons 1 ~
6, respectively. The extensor macroneurons behave in pair with the flexor macroneurons following the
kinetic diagram.
1
c
0
1
d
0
a
1
e
0
1
f
0
6
4
2
1
g
5
3
1
0
1
12
10
8
b
h
0
11
9
7
0
10
20
30
40
50
60
70
80
90
100
Time (ms)
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
1
1
0
0
0
0
0
0
0
0
0
0
1
1
1
0
0
0
0
0
0
0
0
0
0
1
1
1
0
0
0
0
0
0
0
0
1
0
1
1
1
0
0
0
0
0
0
0
=
[
]
=
ij
1
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
1
1
0
0
0
0
0
0
0
0
0
0
1
1
1
0
0
0
0
0
0
0
1
0
0
1
1
1
0
0
0
0
0
0
0
1
1
0
1
1
1
0
simulating CPGs in a uniform framework is
proposed. Some preliminary definitions, in-
cluding the basic topologic requirements for
the target modelling
and the characteristics
of the novel network are demonstrated.
2.
The
equivalence between the novel neural
network architecture and the plausible func-
tionalities of biological CPGs is produced.
Simple and composite OBBs generating
different rhythmic patterns were presented.
Such scheme was proven to be efficient on


















Search WWH ::

Custom Search