Biomedical Engineering Reference
In-Depth Information
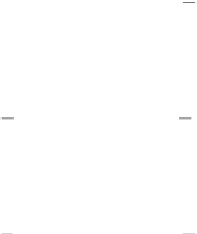
Figure 9. A general locomotor CPG architecture of 2n-legged animal. Each macroneuron couples with
all of the rest 4n-1 macroneurons, which is not shown explicitly. The upper is the flexor layer and the
lower the extensor layer.
2n
6
4
2
2n-1
5
3
1
Head
4n
2n+2
4n-1
2n+1
3. If the phase difference between one mac-
roneuron and anyone of its contralateral
macroneurons (in the same layer) is less
than that between this macroneuron and its
ipsilateral neighbours
,
then two contralateral
macroneurons have a connection.
4. Based on the above connection, different
arrangement of initial membrane potential of
clones may lead to different gait patterns.
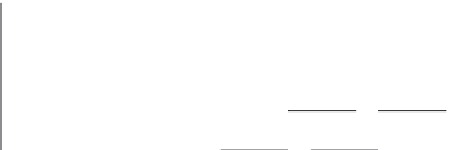
The rolling tripod is a gait that ipsilateral
legs are one-third period out of phase while
contralateral legs are half period out of phase. A
coupled structure with 30 connections, derived
from the original all-connected, general gait
model, is achieved according to the
criteria for
macroneuron interconnection (see Figure 10b).
Each macroneuron has five clones, with one
having their reversibilities. The arrangement of
initial membrane potentials of all clones of 12
macroneurons is to make this rolling tripod gait
model generate rhythmic patterns in the following
kinetic diagram, in which a pair of numbers is
a pair of macroneurons firing simultaneously
. A
fraction in the curly bracket
is the phase within a
period when the pair
of macroneurons fire.
From a standing posture of a stick hexapod
insect (Figure 10a) which keeps all structural
symmetry with all macroneurons in the 12-cell
network permutable, eight symmetry-breaking
branches are bifurcated to eight primary gait pat-
terns (Buono & Golubitsky, 2001; Golubitsky et
al., 1999) as shown in Table 2. Among the total
twelve macroneurons
{1,2,…12}
in this system
,
we
take its upper layer subgroup
{1,2,…6}
as the set
of flexors driving rear left (RL), rear right (RR),
middle left (ML), middle right (MR), front left
(FL) and front right (FR) legs, respectively. The
complexity of numerical simulation of multiply
legged animals increases arithmetically with the
number of legs. In order to avoid enumerative
listings we only deal with one hexapod gait, the
rolling tripod. All other hexapod gaits can be
simulated using the general model, in a same way
as the rolling tripod gait.
5
(
11
){
0
⇒
(
11
){
0
⇐
(
4
10
){
}
6
⇓
⇑
1
2
(
6
){
}
(
){
}
6
3
⇓
⇑
1
){
1
(
3
⇒
(
2
12
){
}
2






































Search WWH ::

Custom Search