Biomedical Engineering Reference
In-Depth Information
discovering. A generalization of scalability to
closely emulate biological systems, in the sense
of self-organization, is still an open subject.
evolution over time. These agents interact and
connect each other in unpredictable and unplanned
ways. However, from the set of interactions,
regularities emerge to form patterns that feed-
back on the system and inform the interactions
of the agents (Tay & Jhavar, 2005). Examples of
complex adaptive systems are the immune sys-
tem (Timmis, Knight, de Castro & Hart, 2004)
(Roitt, 1997), the self-organized artificial neural
system (Haykin, 1999), and the artificial evolution
(Nolfi & Floreano, 2000). In particular,
coordina-
tion
and
behaviour integration
are also central
topics in the study of self-organizing collective
behaviours in nature (Baldassarre, Nolfi & Parisi,
2002). As stated in (Nolfi, 2005), the interaction
among simple behavioural rules followed by each
system component might lead to rather complex
collective behaviours
A central issue is then to achieve behaviour
coordination able of self-adaptation. Then the
objective of this section is to describe a feasible
technique for behaviours coordination based on
the artificial immune system metaphor, which
seems to meet these requirements.
bEHAvIOUR COORDINATION
bASED ON THE ARTIFICIAL
IMMUNE SySTEM
Studies on self-organizing systems have emerged
as a major part of the biological-inspired approach
in response to challenges introduced by control
systems design complexity in real problems
(Nolfi & Floreano, 2000). Due to its distributed
characteristic, the main ideas of self-organis-
ing design are the use of principles in nature to
develop and control complex adaptive systems.
This organization tends to be robust enough to
reject perturbations (Jakobi, 1997).
The basic building blocks of these complex
adaptive systems are
agents
. Agents are semi-
autonomous, or autonomous, units that seek to
maximize some merit figure or fitness by its
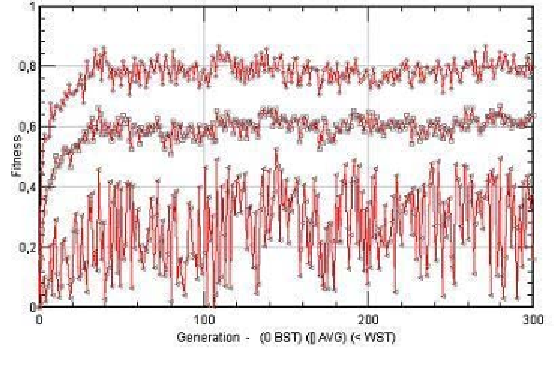
Figure 7. Performance of the best, the mean, and the worst neurocontroller over generations. Measure
carried out according to the fitness function on a population of FFNN controllers in obstacle avoidance
when reaching the goal. Behaviour development is obtained in approximately 40 generations.
Search WWH ::

Custom Search