Biomedical Engineering Reference
In-Depth Information
placed perpendicularly to the floor of the arena at
approximately 3 cm. high. Please refer to Figure
6. The test room presented other non-controlled
light sources, such as fluorescent lights (zenithal)
and natural light from windows. Some experiments
reported in the literature use a dark environment
only lighted by the source used as reference like
in (Nolfi & Floreano, 2000). This represents a
fully-controlled test environment. Although this
alternative can simplify the interpretation of the
final results, the experiment proposed in this ap-
proach was aimed to analyzing the controller's
behaviour in partially uncontrolled environment,
which is closer to a real situation. The prototype
performs very well avoiding concave and convex
obstacles, phototaxis, and wall seeking behaviours
and hence emerging a sophisticated path genera-
tion behaviour learned from its own experience.
Evolution performance for the obstacle avoidance
behaviour is shown in Figure 7. Comparison is
based on fitness scores and convergence time.
Further details of results are given in (Fernández-
León, Tosini & Acosta, 2004-2005).
This methodology then demonstrated very
good conditions to face real-world problems
in an efficient way. From a pure evolutionary
perspective, however, it must be quoted that
this methodology is still too much dependent on
the human engineer previous knowledge on the
problem to solve. Evolution was done from a rigid
and prescribed framework. Subdivision in atomic
tasks, individual fitness functions and coordina-
tion rules are strongly user dependant, leaving
small chance for self-organization and feature
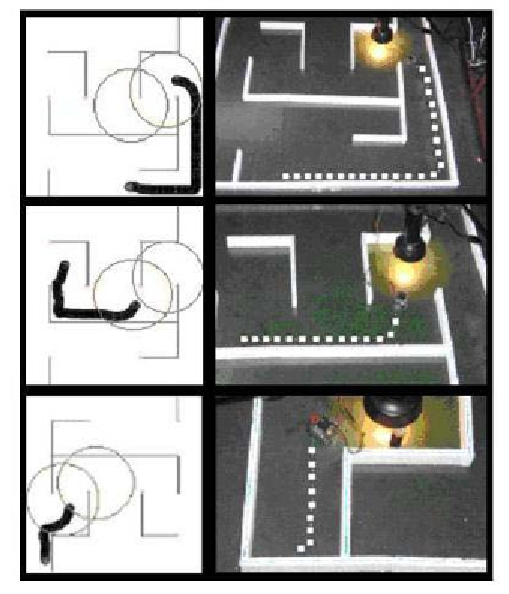
Figure 6. Evolutionary path generation tested in a small robot a) in simulation environment and b) in
a real environment
Search WWH ::

Custom Search