Biomedical Engineering Reference
In-Depth Information
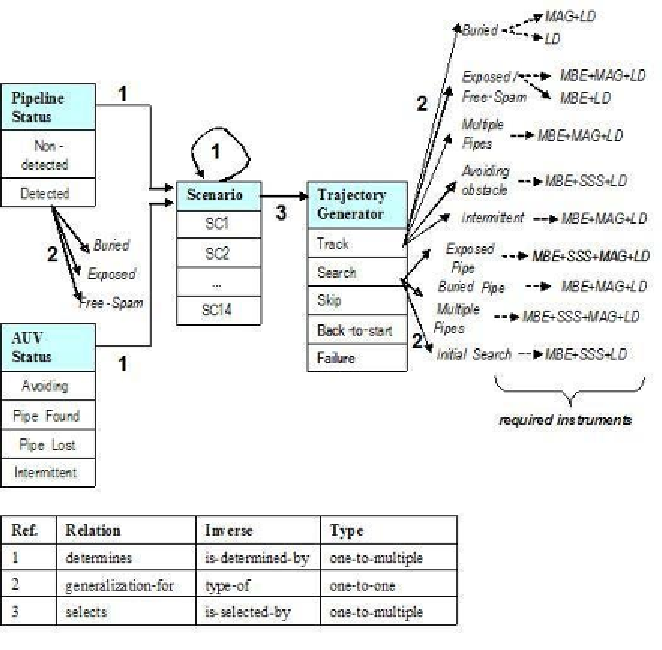
of trajectory (
search, back-to-start, skip
, and
track
). Scenarios are based mainly on two ideas:
the survey types and the AUV status as regards
as the inspected target. The type of survey is de-
fined a priori in the mission settings, to establish
the number of pipelines/cables to be tracked, the
navigation depth, and other mission features. The
AUV status changes when the SFM updates its
sensors and classify the situation as target seen,
target lost, target seen intermittently, and avoiding
obstacles. The KB conceptualization is presented
in Figure 3.
The scenarios developed for the sea trials
during 2004 were diverse (14 in total). Some
examples are: 1
st
Scenario: The AUV is tracking
an exposed pipeline, navigating on top, at a fixed
offset smaller or equal than 5 meters. Both the
MBE and the MAG detect it. 2
nd
Scenario: The
AUV is tracking a buried pipeline on top, at a fixed
offset smaller or equal than 5 meters. The MBE
may not be able to detect it, but the MAG can track
it anyway. 3
rd
Scenario: The AUV is tracking an
intermittent (intermittently exposed and buried)
pipeline at a fixed offset. This is a sequence of
alternative appearance of scenarios number one
and two. The preliminary sea trials performed in
the North Sea near Scotland in August/September
2004 and November 2005 showed promising
results and that with traditional AI approaches,
the problem of autonomous underwater inspec-
tion was possible (Acosta, Curti, Calvo, Evans &
Lane, 2005-in press).
Previous examples, as well as the prior and
contemporary work of several other researchers
Figure 3. Knowledge base conceptualization to build the dynamic mission planner
Search WWH ::

Custom Search